






 Home >
Home > Knowledge Base >
Knowledge Base > Community >
Community > Downloads >
Downloads >S300 CAN-Bus
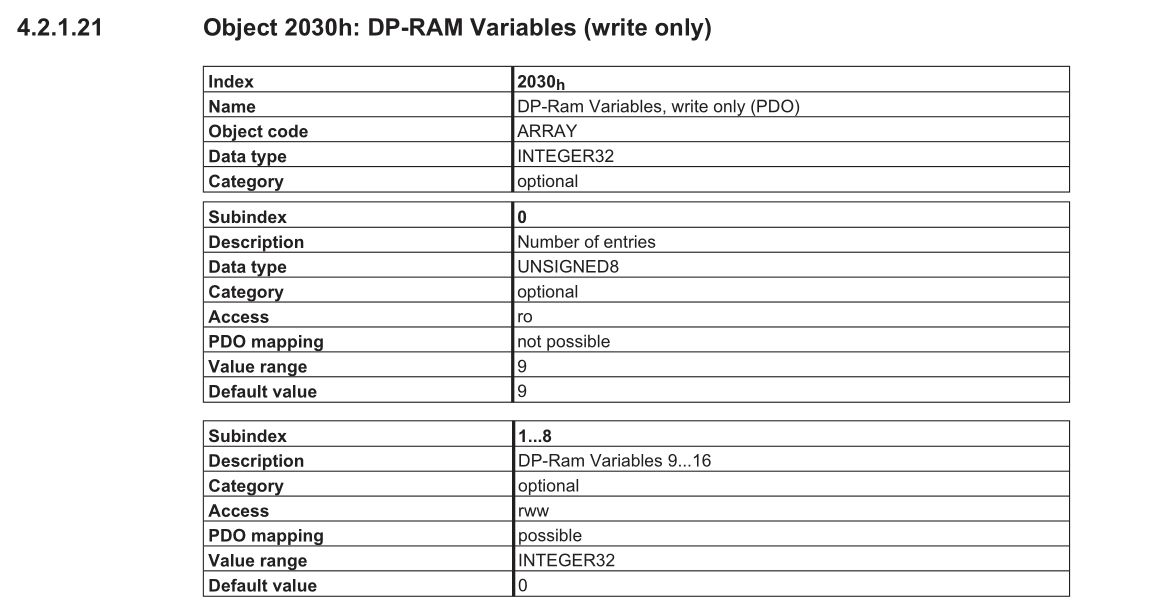
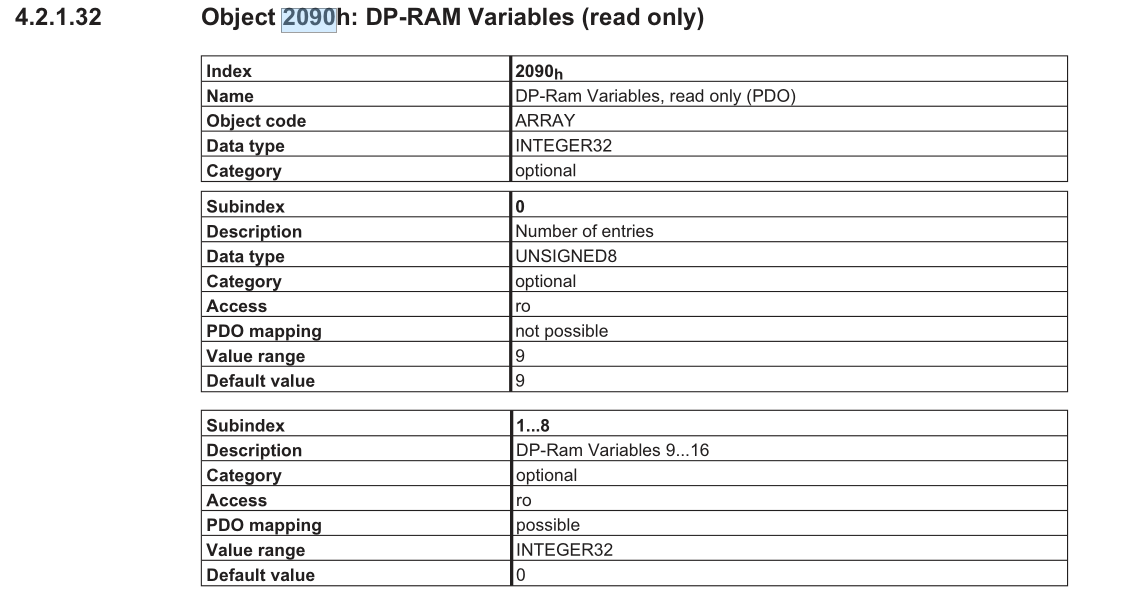
Hello everyone, please give a detailed account of the objects 2030 and 2090 of the handbook and how to use them.Thank you very much!!!
Handbook in attachments
{kind=link}
{kind=link}
Comments & Answers
Dan.Wolke@Koll… said ...
To understand the answer to this question, you first need to understand PDOs and cyclic data. During the drive setup or "run-up" for cyclic data transfer (Op Mode), the CanOpen master uses SDO message types to configure the drive for what data will be sent and/or received after the drive is put into OP Mode. At this time, the drive can be configured to send data based on time or syc NMT message or "any time there is a change in the data".
The problem with "change in the data" is some objects are in constant flux. Example is 0x6064, position feedback. If you have mapped 0x6064 to your PDO1, along with 0x6041 (status word), the drive will send the PDO like a machine gun because the position value is always changing. But you may only want to have the PDO1 sent when 0x6041 changes so you mask the 4 bytes for 0x6064.
Example: You map PDO1 for 0x6064 and 0x6041. That 6 bytes, first 4 bytes (byte 0 to byte 3) is 0x6064 and the last two bytes (byte 4 to byte 5) are 0x6041. Byte 6 and byte 7 are not used. If you want to only send PDO1 if 0x6041 changes, then you need to set 0x2014sub1 to 0x00000000 and 0x2014sub2 to 0x00FFFF.
Dan Wolke