





 Startseite >
Startseite > Knowledge Base >
Knowledge Base > FAQs nach Themen >
FAQs nach Themen > Downloads >
Downloads >Tuning - Antriebsinterne Frequenzanalyse
Gültig für S300, S700
Quelle: SPS/IPC/Drives 2007: Antriebsinterne Frequenzanalyse zur Parameteroptimierung von Servoreglern
Einführung
Hochdynamische Servoantriebe sind weiterhin ein schnell wachsendes Marktsegment. Bürstenlose Konzepte haben sich hier besonders im Blick auf Zuverlässigkeit und Baugröße der Motoren als sehr vorteilhaft erwiesen. Dabei wurden immer komplexere Regelalgorithmen mit zusätzlicher Logik und ausgereifter Leistungselektronik möglich. Trotz immer aufwändigerer Antriebssysteme erhöhten sich deren Baugröße und Kosten dank großer Fortschritte in der Halbleitertechnik nicht. Jede neue Antriebsgeneration stellt mehr Dynamik, mehr Flexibilität und eine höhere Integrationsdichte zur Verfügung.
Neben der Erweiterung der Möglichkeiten die moderne Antriebssysteme bieten, erhöht sich gleichzeitig auch die Komplexität der Aufgabe, die wachsende Anzahl der Parameter optimal auf die jeweilige Aufgabe abzustimmen, um die größte mögliche Dynamik zu erreichen. Einige Benutzeroberflächen bieten schon jetzt komfortable Oszilloskopfunktionen an. Besonders in dynamisch anspruchsvollen Anwendungen reicht es jedoch nicht mehr aus, den Regler ausschließlich im Zeitbereich nur mit Hilfe der Betrachtung der Sprungantwort zu optimieren. Um eine Systemanalyse und -identifikation im Frequenzbereich durchzuführen, bedarf es teurer zusätzlicher Geräte und der Fähigkeit, diese Geräte zu bedienen. Alternativ ist es auch möglich, das Übertragungsverhalten des gesamten Systems zu modellieren und dann offline eine Frequenzanalyse dieses Modells durchzuführen. Diese Möglichkeit ist einerseits sehr zeitaufwändig und andererseits sind auch hier Spezialwissen und -fertigkeiten notwendig.
Es wird ein Werkzeug vorgestellt, dass es dem Benutzer ermöglicht, in einfacher Weise für jede der drei Ebenen der Kaskade eines Servoreglers (Lage-, Geschwindigkeit- und Stromregler) eine Frequenzanalyse durchzuführen. Das Ergebnis wird als Bode-Diagramm mit Frequenzgängen für den geschlossenen und den aufgeschnittenen Regelkreis dargestellt. Sowohl die Bandbreite des Regelkreises als auch Amplituden- und Phasenreserve lassen sich direkt ablesen. Da die Frequenzanalyse softwarebasiert im Servoregler stattfindet und zur Messung die bereits vorhandenen Messsysteme verwendet werden, ist keine zusätzliche Hardware notwendig. Beschränkungen bei der Durchführung der Messung werden ausschließlich von der angeschlossenen Mechanik auferlegt, wie sie auch im normalen Betrieb Anwendung finden. Auf diese Weise können Besonderheiten der Strecke wie z.B. Resonanzen sichtbar gemacht und gezielt unterdrückt werden. Eine entsprechende Verbesserung ist sofort darstellbar. Die Einstellung von Beobachtern und Vorsteuerungen wird durch die schnelle Visualisierung ihres Einflusses auf die Frequenzgänge stark beschleunigt und vereinfacht. Mit Hilfe dieses neuen Werkzeugs sind größere Bandbreiten mit geringerem Parametrieraufwand erreichbar. Es wird gezeigt, dass bei optimal eingestellten Parametern mit einem marktüblichen Servoregler eine Bandbreite von 1kHz im Lageregelkreis bei 250μs Lage-update und 8kHz Schaltfrequenz (62,5μs Strom-update) möglich ist.
Regelstruktur / Aufbau
Im Allgemeinen sind Servoregler in einer Regelkaskade aufgebaut, bei der der innerste Regelkreis das Drehmoment bzw. die Kraft, der überlagerte Kreis die Drehzahl, oder bei Linearantrieben die Geschwindigkeit, und der äußere Kreis die Lage bzw. die Position regelt. Da der Strom proportional zum Drehmoment bzw. zur Kraft ist, bildet die Kaskade die mechanischen Zusammenhänge ab. (Bild 1)
In jeder Ebene des kaskadierten Regelsystems können die einzelnen Regelgrößen in ihrem Betrag begrenzt und so an die elektrischen und mechanischen Maximalwerte des Antriebs und der Anlage angepasst werden. Das Hauptaugenmerk liegt bei diesem Beitrag auf dem Lageregelkreis. Die unterlagerten Regler sollen aber nicht außer Acht gelassen werden.
Bild 1: Kaskadenregelung eines Servoreglers mit Drehzahlbeobachter
Sprungantwort und Bode Diagramm
Die einfachste und heutzutage mit wenig zusätzlichem Aufwand zu bewerkstelligende Art, jedes System zu betrachten, ist die Abbildung der einzelnen Größen gegenüber der Zeit, wie dies z.B. ein Oszilloskop tut. Damit in digitalen Servoreglern auch Größen gezeigt werden können, die nur intern berechnet werden, existieren schon verschiedene Softwarebasierte Oszilloskope (1-3). Im Zeitbereich wird im Allgemeinen zur Bewertung der Qualität und Stabilität der Regelung die sogenannte Sprungantwort herangezogen. Dem Regelkreis wird dabei eine sprungförmige Führungsgröße vorgegeben und demgegenüber wird der Verlauf der Regelgröße, die Antwort aufgezeichnet. Gütekriterien wie die Anregelzeit, die Überschwingweite oder die Ausregelzeit sind hinlänglich bekannt (Bild 2).
Picture 2: step response of a PT2-section (control start time tan, overshot width ü, control stop time T)
Das Bode-Diagramm ist eine Möglichkeit, den Frequenzgang eines Systems darzustellen. Es hat sich in der Praxis aus verschiedenen Gründen als praktikabel herausgestellt und wird deshalb hier verwendet. Z.B. lässt das Bode-Diagramm nicht nur eine Aussage über die Stabilität eines Systems mit den augenblicklichen Einstellungen zu, sondern ermöglicht ebenfalls, auf einfache Weise eine Aussage darüber zu treffen, welchen Einfluss die Veränderung bestimmter Parameter auf das Verhalten des Systems haben wird.
Das Bode-Diagramm trennt den Verlauf der komplexen Übertragungsfunktion relativ zur Frequenz in ihren Betrag und ihre Phase auf. Sowohl die Frequenz als auch der Amplitudengang der Übertragungsfunktion werden logarithmisch aufgetragen. Dadurch werden alle Übertragungsfunktionen, die normalerweise miteinander multipliziert werden in eine Addition überführt. Der Einfluss jedes neuen Übertragungsgliedes lässt sich sehr einfach überblicken und vorhersagen.
Erzeugung des Bode - Diagramms
Um ein solches Bode-Diagramm zu erzeugen, wird der entsprechende Regelkreis für alle gewünschten Frequenzen nacheinander mit sinusförmigen Sollwerten beaufschlagt (1) und gleichzeitig wird die Antwort des Systems ausgewertet (2). Die ebenfalls sinusförmige Antwort des Systems kann sich dabei in Betrag und Phase unterscheiden (Bild 3).
![]() (1)
(1)
![]() (2)
(2)
Bild 3: Anregung des Systems (blau) und Messung der Antwort (rot)
Die abgetasteten Signale der Regelgröße werden mit dem Sinus und dem Cosinus der Anregungsfunktion gewichtet und summiert. Dies entspricht einer diskreten Fourier-Transformation (DFT) bei der vorgegebenen Frequenz. Um ein vollständiges Bode-Diagramm zu erhalten, muss dieser Vorgang für alle gewünschten Frequenzstützpunkte durchgeführt werden.
Bild 4 zeigt als Ergebnis einer solchen Messung das Bode-Diagramm des Drehzahl-Regelkreises eines SERVOSTAR S300 (3)
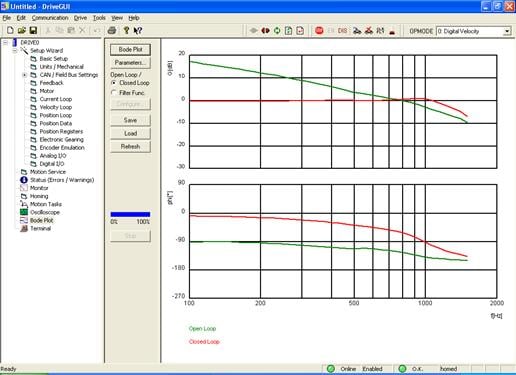
Bild 4: Bode-Diagramm (open loop und closed loop) des Drehzahlregelkreises eines S300 (3)
Beispieltrajektorie
Anhand einer einfachen Beispieltrajektorie, die einen Verlauf des Positionssollwerts vorgibt, soll das Verhalten einer Lageregelung veranschaulicht werden. Der Antrieb bekommt die Aufgabe, eine vorgegebene Endposition in einer bestimmten Zeit zu erreichen. Dazu wird er in einer ersten Phase beschleunigt, bewegt sich mit konstanter Geschwindigkeit und wird schließlich wieder abgebremst. Ein solcher Vorgang wird naturgemäß im Zeitbereich beobachtet.
Wenn die Optimierung der Parameter im Zeitbereich mit Hilfe der Sprungantwort vorgenommen wird, ist die Verbesserung des Verhaltens z.B. in Bezug auf den Schleppfehler nur in einem begrenzten Maß erreichbar, Bild 5a.
Das Verhalten des Antriebs in Bezug auf den Schleppfehler ist in Bild 5b schon deutlich verbessert worden, obwohl sich der zeitliche Verlauf der anderen Größen nicht wesentlich geändert hat. In Bild 5c verschwindet der Schleppfehler fast vollständig. Hier wurde der Antrieb mit Hilfe der Bode-Diagramme in allen drei Regelkreisen optimal in Richtung höchste Dynamik parametriert.
Während der Phase mit konstanter Geschwindigkeit sorgt die Drehzahlvorsteuerung dafür, dass die geforderte Position eingehalten wird. Und während der Beschleunigungsphasen (Drehzahlrampen und Drehmoment bzw. Strom) trägt die Stromvorsteuerung dazu bei, dass auch diese Anforderungen optimal erfüllt werden.
Besonders zu den Zeitpunkten, wenn sich das Drehmoment und dementsprechend der Strom stark ändern muss, werden an die Antriebsregelung höchste dynamische Anforderungen gestellt, die sich allein mit einer Parametrierung im Zeitbereich kaum erfüllen lassen.
Möglichkeiten
Bild 5: Verlauf der Trajektorie (Lage, Drehzahl, Strom und Schleppfehler, von oben) ohne Vorsteuerung (a), mit Drehzahlvorsteuerung (b), mit Strom- und Drehzahlvorsteuerung (c).
Mit Hilfe des Bode-Diagramms lässt sich jeder der drei Regelkreise sehr einfach parametrieren. Ein Oszilloskopbild gibt dagegen zwar Aufschluss darüber, ob der Regelkreis schon instabil ist oder nicht, das Bode-diagramm aber gibt dem Benutzer auch ein Maß dafür wie „nah“ er schon an der Stabilitätsgrenze ist. Zwei Werte geben darüber Auskunft: Die Phasenreserve und die Amplitudenreserve im aufgeschnittenen Regelkreis. Außerdem können sofort Frequenzen identifiziert werden bei denen der Regelkreis überschwingt (Peaking). Diese Stabilitätsuntersuchungen werden immer im Kleinsignalbereich ohne Vorsteuerungen durchgeführt.
>Der Ausgleich einer möglicherweise vorhandenen flexiblen Kopplung zwischen Last und Antrieb oder Motor und Feedbacksystem, einem sogenannten Zweimassenschwinger, ist im Zeitbereich kaum möglich. Die auftretenden Resonanzen lassen sich dagegen im Frequenzbereich mit Hilfe des Bode-Diagramms sehr einfach identifizieren und mit den entsprechenden regelungstechnischen Werkzeugen (z.B. Beobachter) kompensieren (4, 5). Dies gilt ebenfalls für andere Resonanzen, die möglicherweise konstruktionsbedingt lastseitig vorhanden sein können.
Für die Dynamik des Regelkreises relevanter und deshalb deutlich interessanter sind Elemente, die den Verlauf der Phase beeinflussen. Diese Effekte sind im Zeitbereich nicht zu erkennen. Den größten Einfluss auf die Phasenlage haben immer die Verzögerungszeiten innerhalb des Systems. Sie lassen sich niemals ganz eliminieren, aber mit einigen besonderen Algorithmen oder durch Vorsteuerungen in ihrer Auswirkung begrenzen. Auf diese Totzeiten und die Vorsteuerungen wird im folgenden Abschnitt noch gesondert eingegangen.
Eine Möglichkeit, die Verzögerungszeiten zwar nicht zu umgehen, im regelungstechnischen Sinne aber effektiv zu kompensieren, ist der Smith Predictor (6), der sich besonders für den Stromregelkreis anbietet, da hier naturgemäß die höchste Dynamik gefordert wird. Auch dieser Effekt lässt sich nur mit einer Betrachtung im Frequenzbereich exakt darstellen.
Totzeiten und Vorsteuerung
>Bild 6: Kaskade mit Verzögerungszeiten Tx und Vorsteuerungen FFV und FFT
>Kein System arbeitet völlig verzögerungsfrei. Aus den unterschiedlichsten Gründen werden die Signale in einem regelungstechnischen System immer erst später weitergegeben als es an sich wünschenswert wäre. Der einfachste Grund ist beispielsweise die Verarbeitungszeit, die digitale Bausteine immer benötigen. Aber auch Rückführungssysteme können zu dieser Verzögerung beitragen. Besonders die Verzögerungszeit im Stromregelkreis ist maßgeblich für die Begrenzung der Dynamik dieses Regelkreises verantwortlich. In Bild 6 ist die Verzögerungszeit durch die Abtastung mit Ta/2 abgeschätzt dargestellt. Der Einfluss dieser Verzögerungen wird in einem Bodeplot durch die Phasenverschiebung sichtbar gemacht.
In Bild 6 sind außerdem zwei Vorsteuerungen eingezeichnet. Für die Drehzahlvorsteuerung (Feed Forward Velocity, FFV) wird der Positionssollwert einmal numerisch differenziert und direkt zu dem Drehzahlsollwert addiert. Für die Drehmomentvorsteuerung wird dieser Wert ein zweites Mal differenziert und dann dem Stromsollwert hinzugefügt. Die Drehzahl ist die Ableitung der Lage nach der Zeit und das Drehmoment ist die Ableitung der Drehzahl nach der Zeit. Die Vorsteuerungen machen sich dieses Wissen über die mechanischen Zusammenhänge zu Nutze und sagen die benötigte Drehzahl und das benötigte Drehmoment voraus mit dem eine geforderte Position optimal erreicht wird. Die Vorsteuerungen beschleunigen auf diese Weise den gesamten Regelkreis deutlich.
Diese beiden Vorsteuerungssignale können natürlich auch um eine bestimmte Zeit verzögert werden. Wobei auch gezielt Einfluss auf diese Zeit genommen werden kann. Sie kann sogar, wenn der Verlauf des Positions-Sollwerts vorher bekannt ist, und die Vorsteuerungswerte im Voraus berechnet wurden und zur Verfügung stehen bevor der eigentliche Sollwert anliegt, auch negativ sein und so eine Art nicht-kausales System erzeugen. Die Vorsteuerungswerte stehen den unterlagerten Regelkreisen dann früher zur Verfügung, als es möglich wäre, wenn sie erst aus dem zeitlichen Verlauf des Positionssollwerts berechnet würden.
Mit diesen Vorsteuerungsgliedern kann die Phasenverschiebung, die durch Verzögerungen verursacht wird, kompensiert werden und außerdem vorhersehbare Sollwertänderungen im Drehzahl- und Stromregler schneller an die unterlagerten Regelkreise weitergegeben werden. Über vier Parameter, die Gewichtung des jeweiligen Vorsteuerungswerts (FFV und FFT) und die beiden Verzögerungszeiten, können die Vorsteuerungszweige eingestellt werden. Der Einfluss der beiden Verzögerungszeiten ist wie der Einfluss der Verzögerungszeiten in den Hauptzweigen im Zeitbereich kaum auswertbar.
Simulation
Bild 7: Simulationsergebnisse für den geschlossenen Lageregelkreis: (a) ohne Vorsteuerung, (b) mit Drehzahlvorsteuerung, (c) mit Strom- und Drehzahlvorsteuerung
Um die Wirkung der Vorsteuerungen zu testen, wurde die vollständige Regelkaskade in Matlab/ Simulink simuliert (vgl. Bild 6). Die Motorwicklung wurde dabei mit einem Verzögerungsglied erster Ordnung modelliert und die mechanischen Zusammenhänge jeweils mit einem Integrator nachgebildet.
In Bild 7 ist der erwartete Phasengewinn für den Lageregelkreis deutlich erkennbar. Ohne Vorsteuerungen hat der Lageregler eine Bandbreite von 500Hz (-90° Phasenverschiebung). Mit Drehzahlvorsteuerung wird eine Bandbreite von 950Hz erreicht und mit der Stromvorsteuerung kann diese in der Simulation bis etwa 1,8kHz erhöht werden.
Der Einfluss der Vorsteuerung und der Frequenzbereich in dem die einzelnen Parameter wirken, ist deutlich zu erkennen.
Simulation mit nicht optimalen Parametern
Der Vorteil des Bode-Diagramms zeigt sich besonders dann, wenn die Parameter nicht optimal eingestellt sind. In Bild 8 wird das Verhalten des Lageregelkreises mit optimal eingestellten Vorsteuerungsparametern verglichen mit den Auswirkungen fehlerhafter Parameter. In Bild 8I werden falsch eingestellte Verstärkungen FFV und FFT (jeweils +3dB) gezeigt. in Bild 8II sind fehlerhafte Verzögerungszeiten (250μs für TFFV und 125μs für TFFT) berücksichtigt.
>Bild 8: Simulationsergebnisse für den geschlossenen Lageregelkreis mit nicht optimalen Parametern
I a) FFV um 3dB zu groß b) FFT um 3dB zu groß
II a) TFFV verzögert b) TFFT verzögert.
Der Einfluss der Vorsteuerung und der Frequenzbereich in dem die einzelnen Parameter wirken, ist deutlich zu erkennen.
Wenn solche fehlerhaften Parameter vorliegen, kann dies leicht anhand des Bode-Diagramms erkannt und korrigiert werden.
Ergebnisse
>Bild 9 zeigt Bode-Diagramme des geschlossenen Lageregelkreises eines Servoreglers mit einem rotatorischen Antrieb ohne Last. Der Lageregler ohne Vorsteuerungen erreicht eine Bandbreite von 400Hz (a). Die Drehzahlvorsteuerung erhöht die Dynamik bereits deutlich auf ca. 700Hz (b). Erst zusammen mit der Stromvorsteuerung bei optimal parametrierten unterlagerten Regelkreisen wird eine Lageregelerbandbreite von 1kHz erreicht (c).
>Bild 9: Bodediagramme (Messergebnisse, closed loop) des Lagereglers:
a) ohne Vorsteuerungen (blau)
b) mit Drehzahlvorsteuerung (rot) und
c) mit Drehzahl- und Stromvorsteuerung (schwarz)
Zusammenfassung
>Es wurde gezeigt, dass das neue antriebsinterne Bode-Diagramm effektiv dazu genutzt werden kann, alle Parameter der Regelkaskade, und dabei besonders solche, die die Phasenlage beeinflussen, schnell und präzise einzustellen. Mit den entsprechenden Vorsteuerungen sind so sogar im Lageregelkreis eines Servoantriebs Bandbreiten von 1kHz erreichbar (bei 250μs Lage-update, 8kHz Schaltfrequenz und 62,5μs Strom-update).
In dem nun folgenden Schritt werden die neuen Werkzeuge auf Basis der Frequenzanalyse zur weiteren Unterstützung des Benutzers bei der Parametrierung der Regelelemente bis hin zu Autotuning genutzt.
Verfasser
>Heiko Schmirgel
Kollmorgen Europe GmbH
Düsseldorf
>Prof. Dr.-Ing. Jens Onno Krah
Fachhochschule Köln
Fakultät IME – NT
Literatur
>Software Oszilloskope verschiedener Hersteller:
1. Global Drive Oszilloskop: Lenze
2. Automation Toolkit EPAS-4: Elau
3. DriveGUI: Kollmorgen Europe GmbH
4. Krah, Lemke: „Geschwindigkeitsbeobachter höherer Ordnung zur Unterdrückung von höherfrequenten Resonanzen bei Direktantrieben“ SPS/IPC/Drives, Seite 431-439, Nürnberg, 2006.
5. Ellis, Krah: “Observer-Based Resolver Conversion in Industrial Servo Systems” PCIM, Seite 311-316, Nürnberg, 2001
6. Schmirgel, Krah, Berger: “Delay Time Compensation in the Current Control Loop of Servodrives – Higher Bandwidth at no Trade-off” PCIM Europe, Seite 541-546, Nürnberg, 2006

Kommentare
why in open loop bode plot curve can be affected by the velocity loop Kp ?
i thought that open loop cannot use PID gain??
thank you
in the bode plot curve ,open loop Is equal to the Plant response multiplied by the Controller just not include feedback
the open loop plot does not mean open loop control