





 Startseite >
Startseite > Knowledge Base >
Knowledge Base > FAQs nach Themen >
FAQs nach Themen > Downloads >
Downloads >Multilink mit Setup Software
Allgemeines
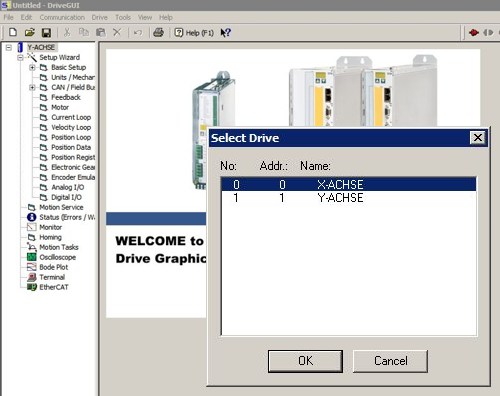
Unter Multilink verstehen wir die Möglichkeit, mit der Setup Software mehrere Servoverstärker über die RS232 Schnittstelle (PC Schnittstelle) anzusprechen. Im Beispiel unten die Verstärker mit den Namen X-Achse und Y-Achse. Unterbrechen der Verbindung und Neuaufbau (Button ![]() zeigt das Auswahlfenster "Select Drive", über das der gewünschte Verstärker im System angewählt werden kann.
zeigt das Auswahlfenster "Select Drive", über das der gewünschte Verstärker im System angewählt werden kann.
Vorteile
Vorteil bei Inbetriebnahme und Regleroptimierung ist besonders die Zeitersparnis und wesentlich vereinfachtes Handling. Wir empfehlen in Mehrachssystemen die für Multilink benötigte Verkabelung dauerhaft zu installieren. Dies ermöglicht z.B. auch eine Fernwartung im Betrieb, wenn die RS232 Verbindung ständig an einem PC im Schaltschrank angeschlossen bleibt.
Nachteile
Die Multilink Funktion muss deaktiviert werden, wenn der CAN Bus als Feldbus im Antriebssystem verwendet wird. Das heißt, die Multilink Funktion kann nur genutzt werden, wenn der CAN Bus nicht anderweitig verwendet wird.
Hardware Voraussetzungen
 |
Ein Servoverstärker (Master) muss mit dem PC über das RS232 Kabel verbunden sein. Untereinander sind alle Servoverstärker über den integrierten CAN Bus verbunden. RS232 Schnittstelle und CAN Schnittstelle liegen physikalisch auf einem SubD Stecker, daher muss für die geforderte Multilink Verdrahtung ein Y-Adapter verwendet werden (siehe Zubehör - Handbuch), der für wahlweise 4 oder 6 Achsen zur Verfügung steht. Spezialanfertigungen für andere Achsenzahlen sind möglich. |
Software Voraussetzungen
| Firmware Version | Setup Software Version |
|---|---|
| ab 3.65 | ab 2.00 Build 0066 |
Einschalten von Multilink
| Parameter | Auslieferstand | Multilink Voraussetzung |
|---|---|---|
| CBAUD | 500 kBaud | muss bei allen Verstärkern identisch sein |
| ADDR | 0 | muss bei allen Verstärkern unterschiedlich sein |
| MDRV | 0 | muss bei allen Verstärkern auf 1 gesetzt sein |
| CCSAVE | 0 | muss bei allen Verstärkern auf 0 gesetzt sein |
- Stellen Sie bei jedem Servoverstärker über die Fronttastatur im detaillierten Menü (beim Einschalten der 24V die rechte Taste gedrückt halten) den Parameter S07 (=MDRV) auf "1". Speichern Sie die Einstellung im EEPROM (cSA).
- Stellen Sie über die Fronttastatur eine individuelle Adresse (Adr) ein. Speichern Sie die Einstellung im EEPROM (cSA).
- Wiederholen Sie dies bei jedem Servoverstärker.
- Verdrahten Sie die Kommunikationsschnittstellen mit dem oben beschriebenen Y-Adapter.
- Schließen Sie den PC an und starten Sie die Setup Software. Alle über den CAN Bus mit dem Master verbundenen Geräte werden nun zur Auswahl angeboten.
(Sollte keine Auswahl angeboten werden, geben Sie bei allen verbundenen Reglern das Kommando CCSAVE 0 gefolgt von SAVE und COLDSTART ein.)
Schalten Sie nun die 24 Versorgungsspannung aus und wieder ein.
Ausschalten von Multilink
Soll z.B. der CAN Bus für andere Zwecke benutzt werden, muss MDRV bei allen Verstärkern wieder auf "0" gesetzt werden. Da alle Geräte im Kommunikationsbus verbunden sind, können Sie dies über das Terminalfenster der Setup Software erledigen:.
1. Geben Sie im Terminalfenster die folgenden Befehlsfolgen ein (hier 2 Slaves und der Master):\ adr2 (letzter Slave)
MDRV 0
Save
2. \ adr1 (vorletzter Slave)
MDRV 0
Save
3. \ 0 (Master)
MDRV 0
Save
Schalten Sie nun die 24 Versorgungsspannung aus und wieder ein.
Back to top