





 Página inicial >
Página inicial > Base de conhecimento >
Base de conhecimento > FAQs >
FAQs > Downloads >
Downloads >Integração de Encoder Externo ao KAS via ABD-EC
Segue abaixo procedimento para implementar um encoder externo com o drive ABD-EC.
1. Conexão Física (Hardware)
O encoder externo deve ser conectado obrigatoriamente à porta CN2-S. É fundamental que o sinal do encoder seja do tipo 5V TTL para garantir compatibilidade com a entrada do drive.
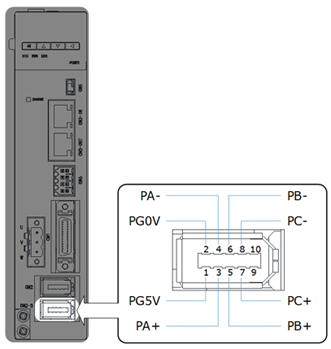
Pinagem do conector CN2-S:
- Pino 1: PG5V (Alimentação +5 V para o encoder).
- Pino 2: PG0V (Referência 0 V).
- Pino 3 e 4: PA+ e PA- (Sinal da fase A).
- Pino 5 e 6: PB+ e PB- (Sinal da fase B).
- Pino 7 e 8: PC+ e PC- (Sinal da fase C/Z).
- Malha: Deve ser conectada ao aterramento do chassi (FG) para proteção contra interferências eletromagnéticas (EMC).
2. Configuração de Parâmetros no Drive (Software ABView)
Para o drive reconhecer e processe os sinais do encoder externo, os seguintes parâmetros devem ser ajustados via software ABView:
- Pn210.0 (Seleção do Encoder Externo): Define a função do encoder externo.
- Pn210.3 (Sentido do Encoder Externo): Caso o sentido de contagem do encoder externo seja oposto ao movimento real da máquina, este parâmetro deve ser configurado como 1 para inverter o sentido da contagem de pulsos.
- Pn211.0 (Pulso C): Configure como 1 se for utilizar o sinal de fase C do encoder externo para o procedimento de homing.
- Pn212 (Resolução do Encoder Externo): Neste é o parâmetro que deve ser inserir o número de pulsos do encoder externo multiplicado por 4 (contagem das bordas de subida e descida das fases A e B em quadratura) por revolução do motor.
- Pn213 (Limite de Desvio de Posição): Define o limite (Threshold) de erro aceitável entre a posição lida pelo encoder do motor e a do encoder externo. Se a diferença exceder este valor, o drive gerará o alarme A94 (Overflow do Desvio de Posição).
Nota importante: Após alterar parâmetros da família Pn210, é obrigatório reiniciar a alimentação do drive para as configurações entrarem em vigor.
3. Integração com KAS IDE
exige configurações no software KAS IDE:
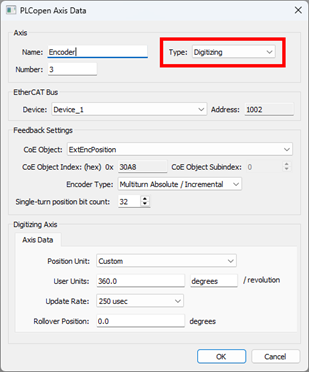
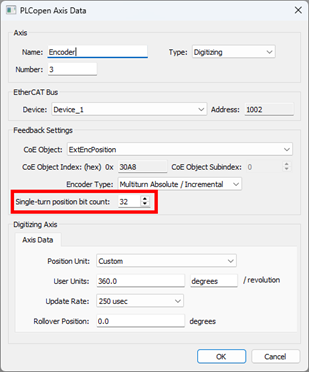
Adição do Eixo: No projeto KAS, você deve adicionar um eixo em PLCOpen do tipo “Digitizing” para realizar a leitura dedicada do sinal do encoder externo.
Configurando o Dispositivo: Deve ser mapeado na rede EtherCat para o drive ABD-EC.
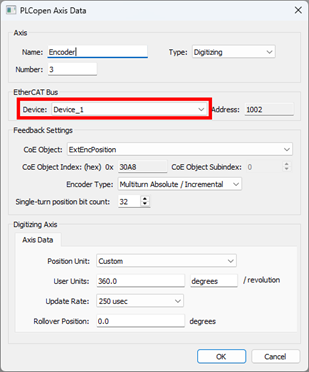
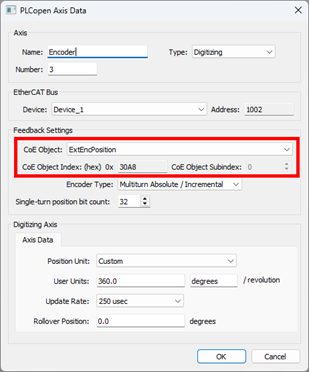
Endereço EtherCat: O objeto CoE deve estar configurado para ler o endereço do encoder externo.
Configuração da Resolução: Aqui deve ser configurado a resolução de pulsos em bits, por exemplo, caso o encoder seja 1024 pulsos a configuração é de 10 bits.
Após realizadas essas configurações no PLCopen, o encoder deve ser adicionado ao programa como um eixo.
