





Muitas aplicações exigem um torque muito elevado e movimento suave em velocidades de motor relativamente baixas. Sistemas eletro-ópticos e infravermelhos são um bom exemplo.
Imagens EO/IR (eletro-ópticas e infravermelhas) são utilizadas em sistemas militares de defesa em uma ampla variedade de aplicações terrestres, aéreas, marítimas e espaciais. Esses sistemas oferecem reconhecimento e direcionamento situacional em todas as condições de iluminação, incluindo dia e noite, neblina, fumaça, tempestades de areia e sujeira. E eles devem obter e manter imagens absolutamente estáveis enquanto contrabalanceiam o movimento devido a aceleração/desaceleração dos veículos, vibração, choques contra estradas, turbulência do ar e outras forças imprevistas.
O torque elevado é necessário para movimentar o estabilizador de imagens rapidamente em resposta a forças de inércia relativamente grandes. O movimento suave é necessário para fornecer a imagem mais clara possível conforme o estabilizador se move e se posiciona em uma sucessão contínua de novas posições. Os motores de baixa velocidade relativa são necessários para manter o sistema leve e responsivo, sem a necessidade de redutores ou outros componentes de transmissão que adicionam complexidade, conformidade e folga ao sistema.
O dilema da tecnologia
Em qualquer aplicação que precise atender requisitos semelhantes, os engenheiros enfrentam um dilema, geralmente agravado por equívocos em relação a tecnologia e recursos de motores.
O torque máximo disponível e a densidade de torque podem ser obtidos por meio de motores sem escovas convencionais com uma carcaça de laminação ranhurada. Ainda assim, esses motores exibem um torque de cogging inerente, que aparentemente afeta a suavidade da operação em baixas velocidades. Os motores sem ranhuras não estão sujeitos ao torque de cogging, mas ainda podem exibir ripple de torque quando energizados e não oferecem o mesmo torque por volume de um motor convencional.
Então, qual tecnologia você deve escolher para aplicações de baixa velocidade e alto torque? E como você pode garantir o movimento mais suave possível? Vamos examinar mais de perto os conceitos relevantes.
Torque de cogging
O torque de cogging é amplamente causado pela atração entre ímãs permanentes montados no rotor e dentes de aço das laminações do estator. O cogging, um tipo de trepidação, pode ser sentido fisicamente como um movimento de um "tranco" quando o eixo de um motor sem escovas convencional é rotacionado. Os motores sem ranhuras não apresentam esta propriedade. Em um estado desenergizado, o rotor pode girar livremente porque os ímãs permanentes não são atraídos pelas bobinas não magnéticas do estator.
Ainda que o torque de cogging possa contribuir para o ripple de torque, é importante observar que as propriedades eletromagnéticas de um motor energizado diferem consideravelmente de um motor desenergizado, e o cogging que você pode sentir com seus dedos não é diretamente traduzido como o cogging que pode ser "sentido" pela carga em movimento.
Ripple de torque
O ripple de torque é a produção de torque desigual através da rotação de um rotor em um motor energizado, causada pelas variações nos campos eletromagnéticos e suas interações entre o rotor e o estator. O torque de cogging em um motor convencional contribui para essas variações.
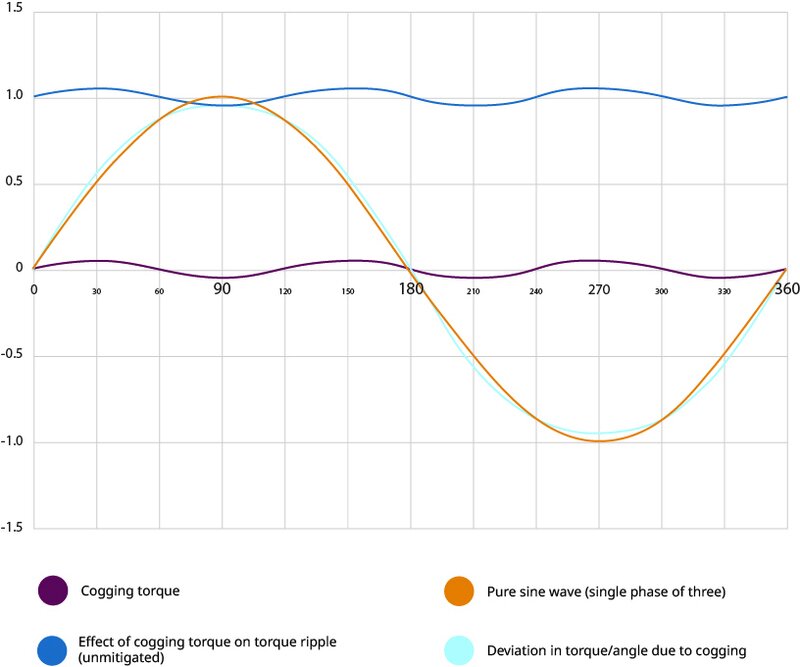
O torque de cogging influencia o ripple de torque em um motor convencional.
No entanto, é importante observar que todos os motores elétricos, incluindo os motores sem ranhuras, exibem ripple de torque. Isso se deve principalmente à reação de armadura, e não ao cogging. Conforme o nível de corrente aumenta, o fluxo no circuito magnético muda, introduzindo harmônicas na forma da onda constante de torque do motor. Este efeito é mais evidente em motores sem ranhuras em correntes médias e altas.
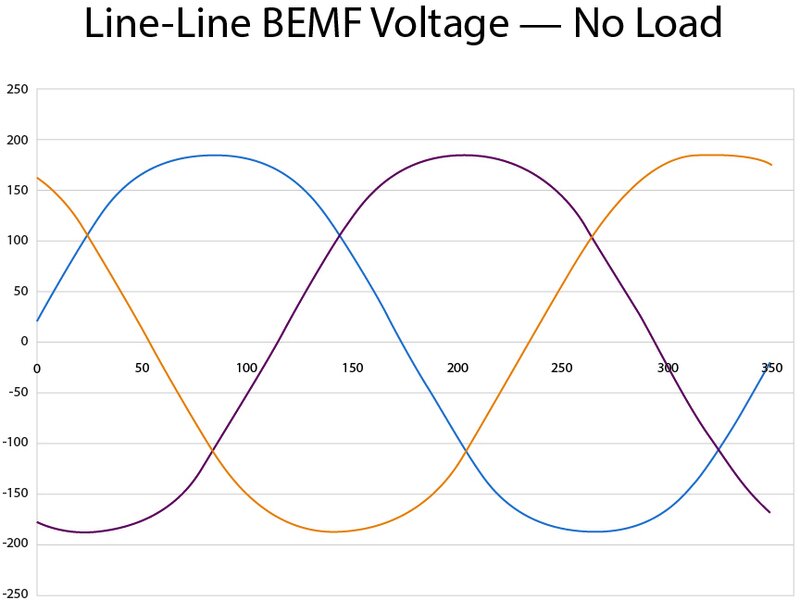
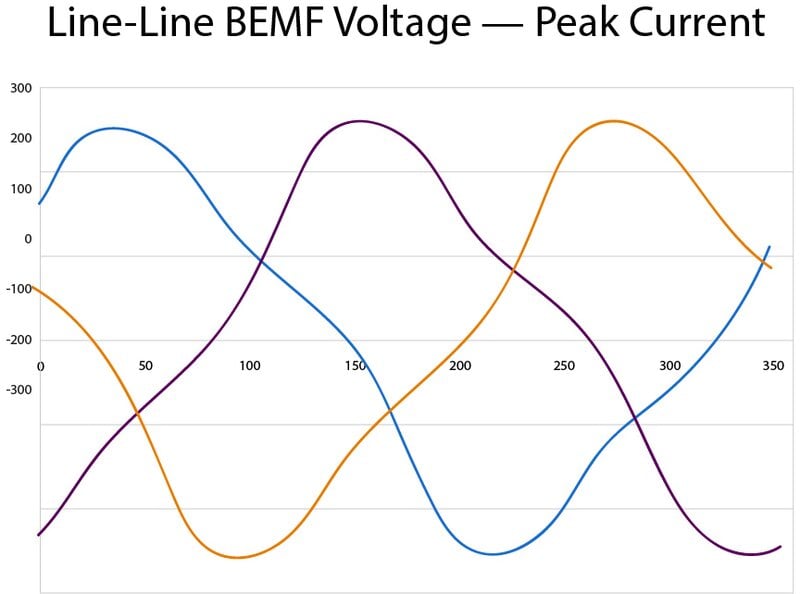
A reação de armadura induz a distorção harmônica em formas de ondas eletromagnéticas, causando ripple de torque em um motor sem ranhuras.
A afirmação de que motores sem ranhuras não apresentam ripple de torque é um mito. Em altas velocidades, a inércia do rotor e da carga tendem a "suavizar" qualquer ripple de torque. No entanto, em aplicações de baixa velocidade, o ripple de torque pode causar flutuações indesejadas na carga movida, seja em um motor convencional ou em um motor sem ranhuras. Para aplicações de baixa velocidade que dependem de movimento perfeitamente suaves, essa é uma questão importante que deve ser levada em consideração no projeto geral do sistema.
Por exemplo, em sistemas EO/IR, o ripple de torque pode comprometer a qualidade dos dados visuais, afetando a precisão do direcionamento em uma aplicação ofensiva, ou até mesmo comprometendo a segurança de um soldado em uma aplicação defensiva.
Carcaça de laminação convencional com ou sem ranhuras?
Os vendedores de motores sem ranhuras podem apontar a falta de torque de cogging como um recurso desejável para aplicações como a EO/IR. Mas o torque de cogging geralmente não é apresentado como uma especificação para servomotores, e há uma boa razão para isso. O comportamento do motor energizado é o que mais importa e, como mencionado anteriormente, todos os motores, incluindo carcaças sem ranhuras, estão sujeitas ao ripple de torque.
Para aplicações EO/IR, motores convencionais sem escovas são normalmente a melhor escolha. Tendo em conta o motor de mesmo tamanho, um motor de laminação sem ranhuras convencional oferece um torque disponível mais alto por volume. Isso é especialmente importante em baixas velocidades (geralmente abaixo de 500 rpm) necessárias em muitas aplicações, como em nosso exemplo EO/IR.
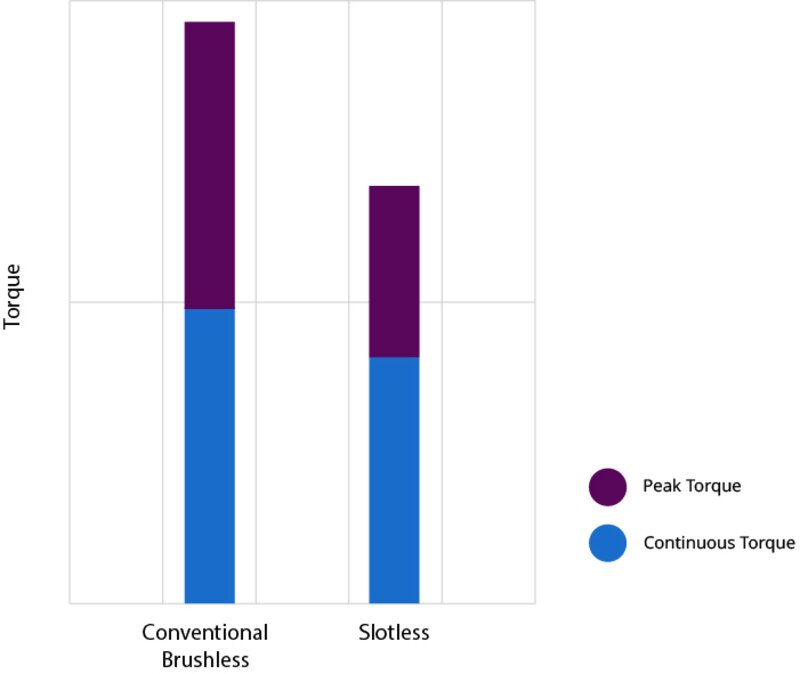
Um motor convencional gera uma constante e torques de pico consideravelmente maiores em comparação a um motor sem ranhuras de volume equivalente.
Veja em nosso blog a publicação "Motores com e sem ranhuras: o que você precisa saber" para se aprofundar nessas carcaças de motores sem escovas e seus pontos fortes particulares de aplicações.
Mitigando o ripple de torque
Supondo que você tenha escolhido um motor sem escovas convencional para fornecer a densidade de torque máxima para sua aplicação de baixa velocidade, o que você pode fazer para minimizar o ripple de torque? Como o torque de cogging pode contribuir para o ripple de torque, um recurso é modificar o motor para reduzir o torque de cogging. Essa abordagem é discutida em "Motores com e sem ranhuras: o que você precisa saber".
Essas variações nas carcaças tendem a reduzir o torque e a densidade de torque em maior ou menor grau. No entanto, elas não conseguem eliminar completamente o torque de cogging. Seja uma carcaça de motor modificado usada ou não, a ferramenta mais poderosa para minimizar o ripple de torque é o sistema de controle, incluindo feedback de alta resolução, malhas de controle de alta frequência de acomodação e algoritmos de drive avançados de cancelamento de perturbação de cargas.
Um sinal de feedback de alta frequência do torque/força sendo aplicados à carga através da rotação do rotor pode ser trazido a um ponto de soma com o sinal de comando do drive, cancelando os efeitos do ripple de torque para manter uma aceleração e velocidade suaves. Isso pode ser comparado à técnica de reversão de fase de 180° usada para remover ruídos externos indesejados em fones de cancelamento de ruídos. Drives avançados do tipos frequentemente usados em aplicações EO/IR podem oferecer essa mitigação de ripple de torque.
Da mesma forma, ao ser executado em velocidade e/ou no modo de loop de posição, a malha de controle de velocidade pode rejeitar o ripple torque somando o sinal de feedback com o sinal de comando. Quando a frequência de acomodação da malha de controle de velocidade é alta o bastante para dominar os contribuidores primários do ripple de torque, o torque de cogging não deve fazer efeito, enquanto que o ripple de velocidade pode ser quase que completamente rejeitada.
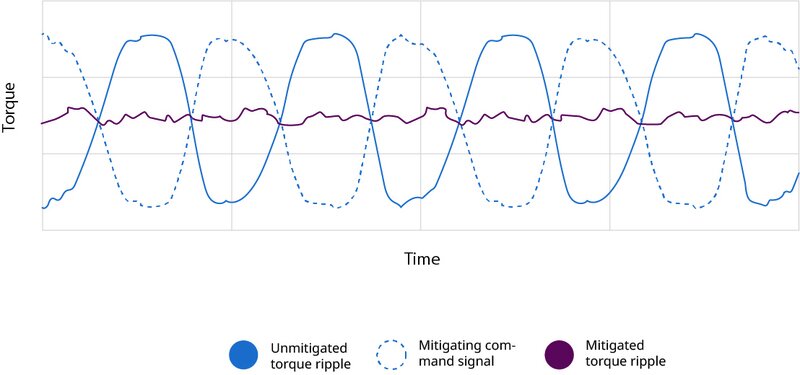
Feedback de alta resolução, malhas de controle de alta frequência de acomodação e algoritmos de drive avançados de cancelamento de perturbação de cargas podem eliminar a maior parte do ripple de torque.
Resumindo
Entre a escolha da tecnologia adequada de motores para a aplicação, usando uma carcaça modificada de motor quando apropriado, e a aplicação de tecnologias de controle para mitigar o ripple de torque, é possível alcançar o equilíbrio ideal de densidade de torque e suavidade em um motor de ajuste perfeito para virtualmente qualquer aplicação.
No caso de uma aplicação de baixa velocidade, de alto torque e supersuave como a EO/IR, isso significa escolher um motor convencional de alto torque – possivelmente com certas modificações na carcaça – para minimizar o cogging, e aplicar as tecnologias apropriadas de controle e feedback para reduzir significativamente o ripple de torque. Outros tipos de aplicação terão seus próprios e específicos requisitos.
A Kollmorgen possui os produtos padrão e modificados, o conhecimento de aplicações específico da indústria e o compromisso com o sucesso colaborativo de que você precisa para atender a praticamente qualquer requisito de movimento. Pronto para descobrir do que sua aplicação é capaz?