





Molte applicazioni richiedono coppia molto elevata e movimento fluido a velocità del motore estremamente basse. I sistemi elettro-ottici/a infrarossi ne sono un esempio emblematico.
L'imaging EO/IR viene usato a scopo di difesa militare in numerose applicazioni terrestri, aeree, navali e spaziali. Questi sistemi garantiscono consapevolezza situazionale e puntamento efficace in tutte le condizioni di illuminazione, sia di giorno che di notte, con nebbia, fumo, tempeste di sabbia e sporcizia. Devono inoltre acquisire e mantenere un'immagine assolutamente fissa controbilanciando il movimento causato da accelerazione/decelerazione, vibrazioni, urti della carreggiata, turbolenze in aria e altre forze non prevedibili.
Una coppia elevata è necessaria per spostare rapidamente la sospensione cardanica del sistema di imaging in risposta a forze d'inerzia relativamente consistenti. Un movimento fluido è necessario per assicurare l'immagine più nitida possibile man mano che la sospensione cardanica si sposta e si stabilizza in una sequenza continua di nuove posizioni. Motori a velocità relativamente basse sono necessari per mantenere il sistema leggero e reattivo, senza bisogno di riduttori o altri componenti di trasmissione che sovraccaricano il sistema a livello di complessità, cedevolezza e gioco.
Il dilemma tecnologico
Per tutte le applicazioni che devono soddisfare requisiti di questo tenore, i tecnici si trovano di fronte a un dilemma, spesso con l'aggravante rappresentata da preconcetti in merito alla tecnologia e alle funzionalità dei motori.
Per ottenere i massimi livelli di disponibilità di coppia e densità di coppia, si possono usare tradizionali motori brushless "slotted lamination". Questi motori, tuttavia, presentano in quanto tali una coppia di cogging, con conseguenza sulla fluidità di funzionamento a basse velocità. I motori "slotless" non sono soggetti a coppia di cogging ma possono comunque presentare oscillazioni di coppia una volta sotto tensione e non sono in grado di erogare lo stesso livello di coppia per volume di un motore tradizionale.
Quale tecnologia scegliere per applicazioni a bassa velocità e coppia elevata? E come garantire il movimento più fluido possibile? Analizziamo più in dettaglio i concetti principali.
Coppia di cogging
La coppia di cogging è dovuta in gran parte all'attrazione tra i magneti permanenti montati sul rotore e i denti in acciaio delle lamine dello statore. Il cogging può essere percepito fisicamente come un movimento vibratorio intermittente durante la rotazione dell'albero di un motore brushless tradizionale. I motori "slotless" non presentano questa caratteristica. Quando non è sotto tensione, il rotore può girare liberamente poiché i magneti permanenti non sono attratti dalle bobine non magnetiche dello statore.
Sebbene la coppia di cogging possa contribuire all'oscillazione di coppia, è importante notare che le proprietà elettromagnetiche di un motore sotto tensione differiscono notevolmente da un motore non sotto tensione, e il cogging percepito con le dita non si traduce direttamente in cogging che può essere "percepito" dal carico in movimento.
Oscillazione di coppia
L'oscillazione di coppia è una produzione di coppia non uniforme durante la rotazione di un rotore in un motore sotto tensione, dovuta a varianze nei campi elettromagnetici e ad interazioni tra rotore e statore. La coppia di cogging in un motore tradizionale contribuisce a queste varianze.
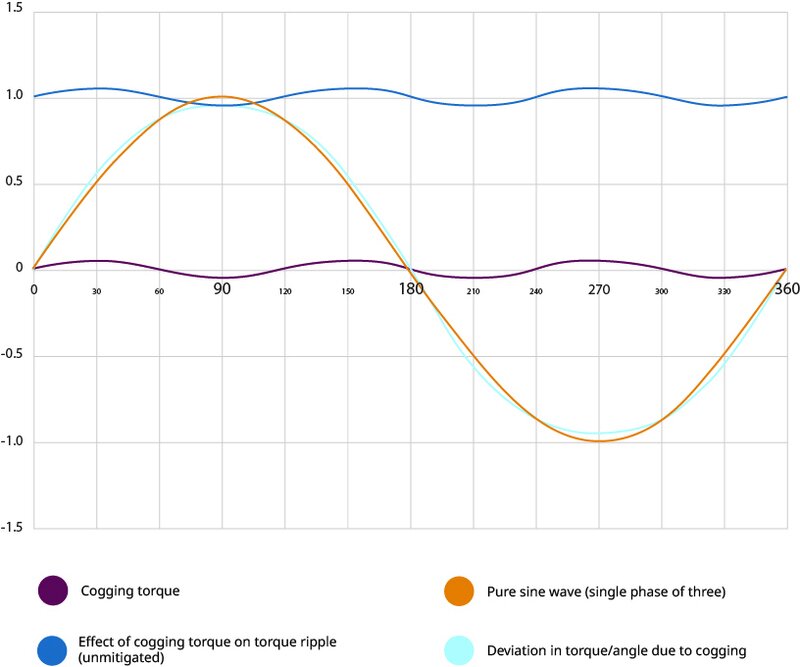
La coppia di cogging influenza l'oscillazione di coppia in un motore tradizionale.
Tuttavia è importante notare che tutti i motori elettrici, inclusi quelli "slotless", presentano oscillazione di coppia. Questa è dovuta principalmente non al cogging ma alla reazione dell'indotto. Man mano che il livello di corrente aumenta, il flusso nel circuito magnetico si sposta ed introduce armoniche nella forma d'onda costante della coppia del motore. Questo effetto è marcato al massimo nei motori "slotless" con corrente da media a alta.
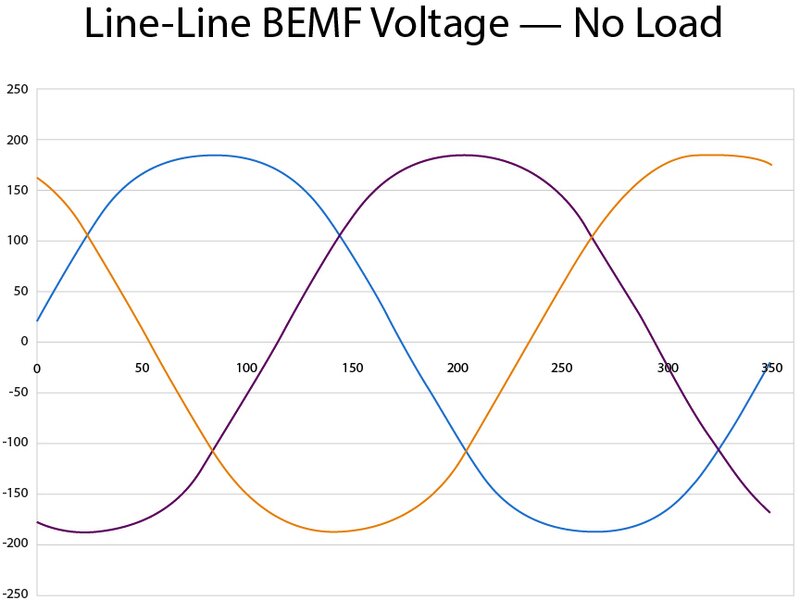
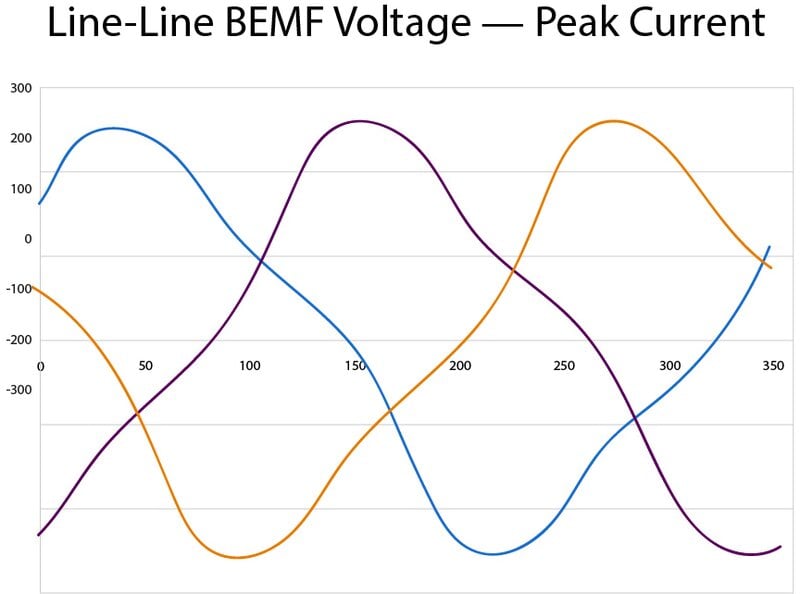
La reazione dell'indotto induce una distorsione armonica nelle forme d'onda elettromagnetica, determinando l'oscillazione di coppia nei motori "slotless".
L'affermazione secondo cui i motori "slotless" non presentano oscillazione di coppia è solo un'utopia. Ad alte velocità l'inerzia del rotore e il carico tendono a livellare eventuali oscillazioni di coppia. Tuttavia, nelle applicazioni a bassa velocità l'oscillazione di coppia può causare fluttuazioni indesiderate nel carico azionato, che si utilizzi un motore convenzionale o uno "slotless". Per le applicazioni a bassa velocità che dipendono da un movimento perfettamente fluido, questo è un problema importante che va affrontato a livello di progettazione globale del sistema.
Ad esempio, nei sistemi EO/IR l'oscillazione di coppia può compromettere la qualità dei dati visivi, influendo sulla precisione di puntamento in un'applicazione per offensiva o addirittura mettendo a repentaglio la sicurezza dei soldati in un'applicazione per difesa.
Design convenzionale "slotted lamination" o "slotless"?
I venditori di motori "slotless" possono individuare nell'assenza di coppia di cogging una caratteristica desiderabile per applicazioni quali EO/IR. Ma la coppia di cogging in generale non è indicata come una peculiarità dei servomotori, e questo per una buona ragione. La cosa più importante è il comportamento del motore sotto tensione e, come detto in precedenza, tutti i motori con design "slotless" sono soggetti ad oscillazione di coppia.
Per le applicazioni EO/IR i motori brushless convenzionali sono in genere la scelta migliore. A parità di dimensioni, un motore "slotted lamination" di tipo tradizionale eroga una coppia superiore per volume. Questo aspetto è particolarmente importante alle basse velocità (tipicamente inferiori a 500 giri/min) necessarie in molte applicazioni, ad es. nel caso di sistemi EO/IR.
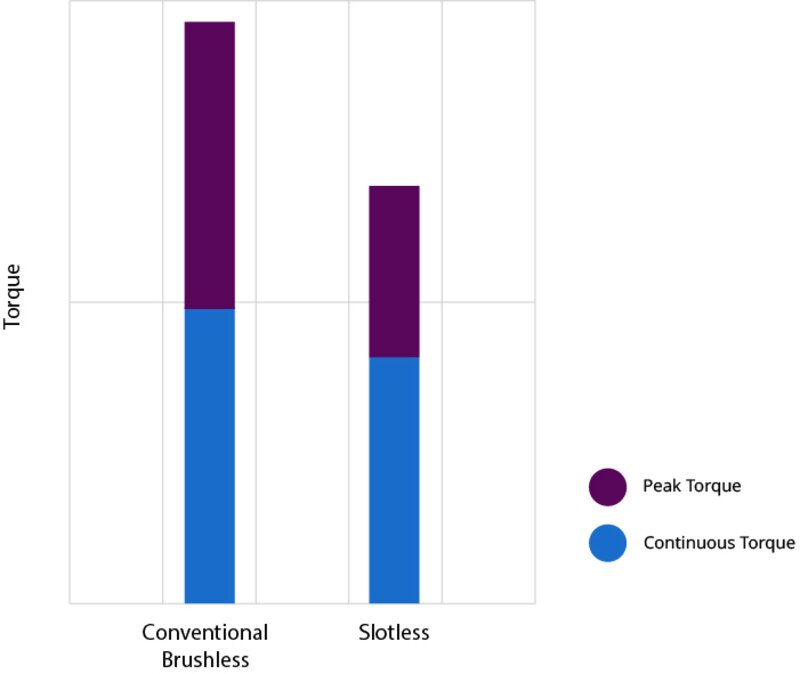
Un motore convenzionale genera una coppia di picco costante significativamente superiore rispetto ad un motore "slotless" di volume analogo.
Consultare il post sul nostro blog “Motori "slotted" o "slotless": cosa occorre sapere” per maggiori informazioni su queste tipologie di motori brushless e sui loro punti di forza specifici.
Attenuazione dell'oscillazione di coppia
Supponendo di aver selezionato un motore brushless tradizionale per ottenere la massima densità di coppia per un'applicazione a bassa velocità, cosa si può fare per ridurre al minimo l'oscillazione di coppia? Poiché la coppia di cogging può contribuire all'oscillazione di coppia, un modo per ridurla è modificare il motore. Parliamo di questo approccio in “Motori "slotted" o "slotless": cosa occorre sapere”.
Queste varianti di design tendono tuttavia a ridurre in misura più o meno consistente coppia e densità di coppia, pur non eliminando completamente l'oscillazione di coppia. Che si utilizzi o meno un motore modificato, lo strumento più efficace per ridurre al minimo l'oscillazione di coppia è rappresentato dal sistema di controllo, con retroazione ad alta risoluzione, anelli di regolazione ad elevata larghezza di banda e avanzati algoritmi di azionamento con eliminazione dei disturbi di carico.
Un segnale di retroazione ad alta risoluzione della coppia/forza applicata al carico durante la rotazione del rotore può essere portato ad un punto di sommatoria con il segnale di comando dell'azionamento, annullando gli effetti dell'oscillazione di coppia per mantenere omogeneità di accelerazione e velocità. Questo approccio è paragonabile alla tecnica di inversione di fase a 180°, utilizzata per rimuovere disturbi ambientali indesiderati in cuffie con eliminazione del rumore. Azionamenti avanzati come quelli utilizzati tipicamente nelle applicazioni EO/IR sono in grado di garantire questa attenuazione dell'oscillazione di coppia.
Analogamente, durante il funzionamento in modalità ad anello di velocità e/o posizione, l'anello di velocità può eliminare l'oscillazione di coppia sommando il segnale di retroazione del motore con il suo segnale di comando. Quando la larghezza di banda dell'anello di velocità sarà sufficientemente elevata da avere la meglio sui fattori primari che influiscono sull'oscillazione di coppia, la coppia di coppia non avrà più effetto e l'oscillazione di velocità potrà essere eliminata quasi completamente.
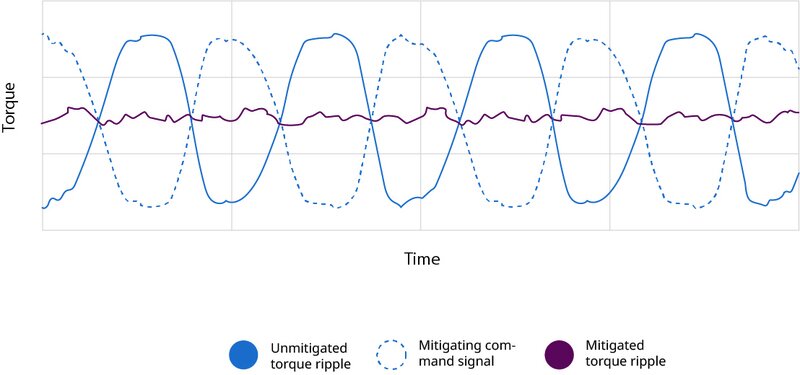
Retroazione ad alta risoluzione, anelli di regolazione ad elevata larghezza di banda e avanzati algoritmi di azionamento con eliminazione dei disturbi di carico sono in grado di annullare la maggior parte dell'oscillazione di coppia.
In sintesi
Tra scegliere il motore giusto per l'applicazione, usare un motore con design modificato ove necessario e applicare tecnologie di controllo per attenuare l'oscillazione di coppia, è possibile conseguire l'equilibrio corretto tra densità di coppia e fluidità in un motore perfetto praticamente per qualsiasi applicazione.
Nel caso di un'applicazione a bassa velocità, coppia elevata e massima fluidità quale EO/IR, la scelta giusta prevede un motore a coppia elevata di tipo tradizionale, eventualmente con alcune modifiche al design, per ridurre al minimo il cogging, con l'applicazione di adeguate tecnologie di retroazione e controllo per abbattere l'oscillazione di coppia. Altri tipi di applicazioni avranno ulteriori requisiti molto specifici.
Kollmorgen ha i prodotti standard e modificati, il know-how specifico del settore in termini di applicazioni e l'impegno a livello di collaborazione proficua che ti servono per soddisfare praticamente tutti i requisiti di motion. Sei pronto a scoprire cosa è in grado di fare la tua applicazione?