





 Startseite >
Startseite > Knowledge Base >
Knowledge Base > FAQs nach Themen >
FAQs nach Themen > Downloads >
Downloads >Messung der Drehmomentkonstante kT
SPS / IPC / Drives 2005: Indirekte Messung der winkelabhängigen Drehmomentkonstante kT für Direktantriebe
Einleitung
In der Automatisierungstechnik hängen der Durchsatz einer Maschine und die Qualität der Produkte maßgeblich von der Antriebstechnik ab. Durch den Einsatz von Direktantrieben können Maschinendurchsatz und Produktqualität oft deutlich gesteigert werden. Um die gewünschte Dynamik zu erreichen, werden bei den verwendeten Regelkreisen oft Drehzahl und Drehmoment vorgesteuert, Bild 1. Die Steuerung des Drehmomentes erfolgt bei den meist verwendeten permanent erregten Synchronmotoren indirekt durch die Vorgabe der drehmomentbildenden Stromkomponente iq(t) . Bei Motoren ohne Rastmoment, und mit einer ideal sinusförmigen induzierten Spannung (EMK) ist diese Vorgehensweise problemlos möglich (1).
Rastmoment können durch ein gutes Motordesign in Kombination mit präziser Fertigung minimiert werden. Verwendet man „eisenlose“ Motoren (kein Eisen im Bereich der Wicklung), können prinzipbedingt keine Rastmomente auftreten. Motoren mit prinzipbedingt sinusförmiger EMK gibt es nicht. Gerade bei hochpoligen Direktantrieben mit maschinenseitiger Lagerung ist die notwendige hochpräzise Einhaltung des Luftspaltes kaum möglich. Bei eisenlosen Motoren wird der magnetische Fluss nicht von den sehr präzise gefertigten Blechen geführt. Hier bestimmt die Lage jeder einzelnen Spulenwindung den Verlauf der EMK.
Es besteht daher der Wunsch, die EMK dieser Motoren im eingebauten Zustand (in der Maschine) bestimmen zu können. Dem steht entgegen, dass eine Maschine nicht viel mit einem klassischen Prüfstand gemein hat. Die Drehzahl ist häufig begrenzt. Meist kann der Antrieb auch nicht beliebig lange mit konstanter Drehzahl betrieben werden. Eine direkte Messung der induzierten Spannung ist dadurch nur selten möglich.
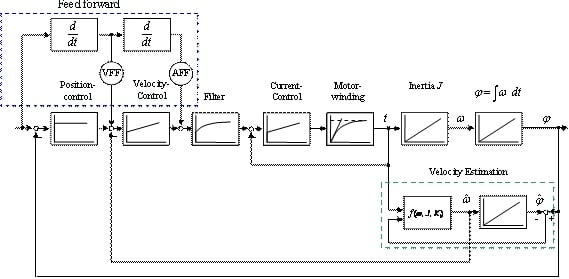
Bild 1: Für eine hochdynamische Regelung eines Direktantriebs wird eine Geschwindigkeitsvorsteuerung (Velocity Feed Forward - VFF) und eine Beschleunigungsvorsteuerung (Acceleration Feed Forward – AFF) benötigt
Betrachtung der physikalischen Grundgleichungen
Die mechanische Leistung - bei Vernachlässigung der Verluste - eines Motors ergibt sich bei rotierenden Maschinen aus dem Produkt von Drehzahl und Drehmoment,
pm(t) = m(t) * ω(t) (1a)
bzw. bei Linearmotoren aus dem Produkt von Geschwindigkeit und Kraft,
pm(t) = F(t) · v(t) (1b)
Die elektrische Leistung berechnet sich bei einem permanent erregten Drehstrommotor aus der Summe der einzelnen Leistungen von den drei Phasen:
pe(t) = uu(t) · iu(t) + uv(t) · iv(t) + uw(t) · iw(t) (2)
Da bei nicht verbundenem Mittelleiter weder die drei Spannungen noch die drei Ströme jeweils unabhängig voneinander sind,
iv(t) = –iu(t) – iw(t)
ist es übersichtlicher die Raumzeigerdarstellung (Park & Clarke Transformation {2}) mit nur noch zwei Spannungen (ua und ub) und zwei Strömen (ia und ib) in rechtwinkligen Koordinaten zu wählen:
pe(t) = ua · ia (3)
mit
ia = iu – 0,5 ( iv + iw ) (4a)
und
 (4b)
(4b)
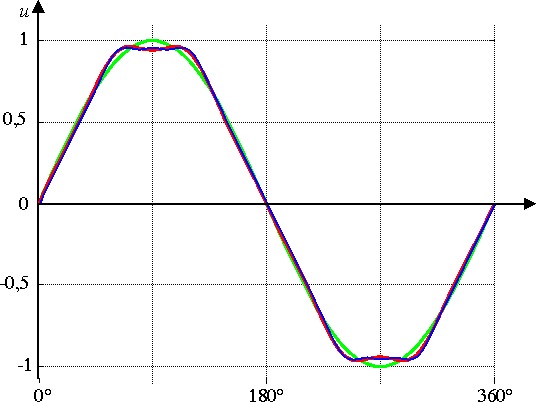
Bild 2: Induzierte Spannung ui einer Phase
Grün: sin(φ)
Rot: sin(φ) – 1/5² · sin(5·φ) + 1/7² · sin(7·φ)
Blau: sin(φ) – 1/5² · sin(5·φ) + 1/7² · sin(7·φ) – 1/11² · sin(11·φ) + 1/13² · sin(13·φ)
Bei einer sinusförmigen induzierten Spannung, Bild 2, verlaufen die Komponenten ua und ub eines dreiphasigen Systems exakt kreisförmig, Bild 3:
ua = û · cos( ω · t ) (5a)
ub = û · sin( ω · t ) (5b)
Wird auch der Strom sinusförmig mit gleicher Phase eingeprägt, so ist die elektrische Leistung unabhängig von der Zeit t :
pe(t) = û · î · ( sin2( ω · t ) + cos2( ω · t ) ) = û · î (6)
Diese Betrachtung wird deutlich anschaulicher, wenn man sich die physikalischen Zusammenhänge der permanent erregten Synchronmaschine mit û ~ ω und î ~ m in Erinnerung ruft.
Ist jedoch die induzierte Spannung nicht exakt sinusförmig, so verläuft der Raumzeiger der Spannung nicht mehr kreisförmig. Damit ist auch die Leistung bzw. das Drehmoment nicht mehr konstant.
Bei den elektronisch kommutierten Gleichstrommaschinen (Brushless-DC, Six Step) enthält die induzierte Spannung prinzipbedingt Oberschwingungen, Bild 3 (blau):
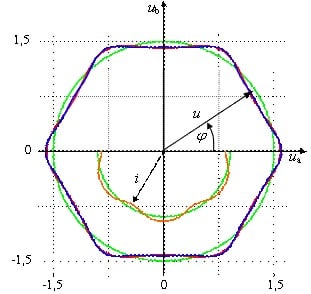
Bild 3: Induzierte Spannung ui in Raumzeigerdarstellung
Grün: sin(φ) ohne Oberschwingungen
Rot: sin(φ) + 5. und 7.
Blau: sin(φ) mit 5. , 7. , 11., und 13.
Orange: angepasster Stromverlauf i

Der Spannungsraumzeiger verläuft dann entlang eines Sechsecks. Es ist leicht ersichtlich, dass an den Orten bzw. Winkeln φ (t) = φ · t , an denen die EMK besonders klein ist (z.B. φ = 30°), der Strom entsprechend größer sein muss, damit die Augenblicksleistung p(t) bzw. p(φ) und damit auch das Drehmoment konstant und damit unabhängig vom Winkel φ ist.
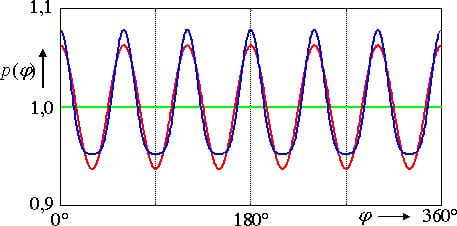
Bild 4: Augenblicksleistung p(j) eines Servomotors bei sinusförmiger Bestromung
Grün: ui = sin(φ)
Rot: ui = sin(φ) – 1/5² · sin(5·φ) + 1/7² · sin(7·φ)
Blau: ui = sin(φ) – 1/5² · sin(5·φ) + 1/7² · sin(7·φ) – 1/11² · sin(11·φ) + 1/13² · sin(13·φ)
Bild 4 (blau) zeigt den Verlauf der Augenblicksleistung p(φ) eines mit konstantem, sinusförmigem Strom betriebenen Brushless- DC Motors bei konstanter Drehzahl.
Dieser Verlauf entspricht - bei konstantem Strom (in Rotorkoordinaten) und konstanter Drehzahl - dem Verlauf der induzierten Spannung uq in Rotorkoordinaten.

Die Komponente ud(t) hat bei Synchronmaschinen ohne Feldschwächung keinen Einfluss auf das Drehmoment bzw. die Leistung. Weil bei konstanter Drehzahl die Leistung nicht konstant ist, kann demzufolge das Drehmoment auch nicht konstant sein.
Der Zusammenhang m = kt · iq kann dieses Verhalten nur beschreiben, weil man kt als „ Winkelabhängige Drehmomentkonstante “ kt(φ) auffasst.
Der Verlauf von kt(φ) ist abhängig vom Winkel, jedoch unabhängig von der Drehzahl, weshalb bei der Beziehung pe(t) = pm(t) die Bedingung der konstanten Drehzahl unerheblich wird.
Bei einem idealen Brushless-DC Motor hätte kt(φ) folgenden Verlauf:

Bei sinusförmiger Bestromung eines solchen Motors kann das Drehmoment sehr genau gesteuert werden, wenn der Stromsollwert mit einer kt(φ) reziproken Funktion winkelabhängig (φ) gewichtet wird, Bild 2.
Von besonderem Interesse ist nun, wie sich Oberschwingungen der in Ständerkoordinaten gemessenen induzierten Spannung auf kt(φ) auswirken:
Nur die Grundschwingung a1 · sin(ω t) entspricht dem gewünschten Verlauf. Sie entspricht einer Konstanten in Rotorkoordinaten.
Die unerwünschten Oberschwingungen
an · sin(n·ω t) + bn · cos (n·ω t) (10)
können in verschiedene Kategorien eingeteilt werden:
- Aus Symmetriebetrachtungen treten theoretisch keine cos( )-Terme auf (bi = 0)
- Aus Symmetriebetrachtungen treten Oberschwingungen mit geraden Vielfachen der Grundschwingung theoretisch nicht auf. (a2 = 0, a4 = 0 , ... )
- In einem Dreiphasensystem (ohne Mittelleiter) kompensieren sich alle durch drei teilbaren Oberschwingungen bei der Transformation in die Raumzeigerdarstellung (Clarke)
Konstruktionsbedingt wirkt sich demnach nur ein kleiner Teil der Oberschwingungen auf den Verlauf der induzierten Spannung in Rotorkoordinaten aus:
a5 , a7 , a11 , a13 , a17 , a19 , ...
Der Verlauf der induzierten Spannung in Feld- bzw. Rotorkoordinaten (ω·kt(φ)) kann durch folgende Fourier-Reihe? beschrieben werden:
uq(t) = c0 + c1 · cos(ω · t) + c2 · cos(2 · ω · t) + c3 · cos(3 · ω · t) + ... (11a)
ud(t) = d0 + d1 · sin(ω · t) + d2 · sin(2 · ω · t) + d3 · sin(3 · ω · t) + ... (11b)
Bei der Transformation in Rotorkoordinaten ergeben sich folgende Beziehungen:
| c0 = a1 | d0 = 0 (=b1) | (12) | |
| c3 = a4 – a2 | d3 = a2 + a4 | ||
| c6 = a7 – a5 | d6 = a5 + a7 | ||
| c9 = a10 – a8 | d9 = a8 + a10 | ||
| c12 = a13 – a11 | d12 = a11 + a13 | ||
| c15 = . . . |
Dieses Verhalten kann wie folgt zusammengefasst werden:
- Ein konstruktionsbedingt nicht sinusförmiger Verlauf der induzierten Spannung in Ständerkoordinaten (a5 , a7 , a11 , a13 , a17 , a19 , ...) beeinflusst die durch sechs teilbaren Oberschwingungen (c6 , c12 , c18 , ...) der Drehmomentkonstanten kt(φ) (~ induzierte Spannung in Rotorkoordinaten).
- Alle anderen eventuell gemessenen Koeffizienten weisen auf mechanische bzw. elektrische Unsymmetrien des Motors hin.
- Aus der gemessenen induzierten Spannung in Rotorkoordinaten (uq) kann der Verlauf in Ständerkoordinaten nicht vollständig berechnet werden (ud fehlt).
- Bei einem BLDC Motor ergeben sich beispielsweise c6 = 0,06 und c12 = 0,014 .
Messung der induzierten Spannung auf dem Prüfstand
Bei industriell gefertigten Motoren ist die Messung der induzierten Spannung einfach möglich. Mit Hilfe einer einfachen Operationsverstärkerschaltung kann die dreiphasige induzierte Spannung des Motors in Raumzeigersignale umgeformt werden. Bild 5 zeigt den weder runden noch exakt sechseckigen gemessenen Verlauf der Spannung.
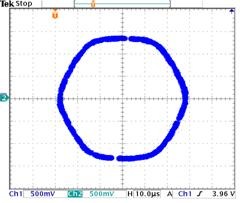
Bild 5 : Gemessener Verlauf der induzierten Spannung in Raumzeigerdarstellung
Messung von kt(φ) auf dem Prüfstand
Eine andere Möglichkeit ist das Messen von kt(φ) bei sehr geringer Drehzahl. Auf einem Prüfstand ist die genaue Messung von Strom und Drehmoment problemlos möglich. Bei dieser Messmethode können jedoch Störgrößen wie Reibung und Cogging (Rastmoment) nicht vernachlässigt werden.
Aus diesen Gründen wird bei konventionellen Motoren kt(φ) meist durch Messung der induzierten Spannung ermittelt.
Messung von kt(φ) in der Maschine
Eine Messung von kt(φ) in der Maschine ist bei vielen Applikationen mit Direktantrieben nicht möglich, da weder eine konstante Drehzahl (bzw. Geschwindigkeit) gefahren werden kann, noch ohne zusätzliche Hilfsmittel das Drehmoment (bzw. die Kraft) genau gemessen werden kann. Doch gerade bei diesen Applikationen wäre eine genaue Messung von kt(φ) wünschenswert:
- Bei Direktantrieben ist nicht immer sichergestellt, dass die Ausrichtung von Primärteil und Magnetbahn bzw. der Luftspalt den Spezifikationen entspricht.
- Oft wird ein Direktantrieb deshalb ausgewählt, weil die Maschine über ein Maximum an Dynamik und Genauigkeit verfügen soll.
Wenn das Trägheitsmoment J (bzw. die Masse m) konstant ist, kann das Drehmoment m (bzw. die Kraft F) indirekt über eine Messung der Beschleunigung a ermittelt werden:
F = m · a (13)
Bei hochdynamischen Antrieben ist eine genaue Messung der Beschleunigung auch nicht problemlos. Einfacher und deutlich genauer ist eine Messung der Kreisverstärkung des aufgeschnittenen Drehzahlregelkreises (open loop) bei einer konstanten vorgegebenen Kreisfrequenz ω0 als Funktion der Position {3}.
![]() (14)
(14)
Die Übertragungsfunktionen
- des Drehzahlreglers GR(jω0),
- des geschlossenem Stromregelkreises GES(jω0) und
- der Last 1 / (j · ω0 · J )
sind bei einer festen Kreisfrequenz ω0 konstant. Daraus folgt, dass bei ebenfalls konstantem Trägheitsmoment J die Kreisverstärkung des aufgeschnittenen Drehzahlregelkreises (open loop) direkt proportional zur Drehmomentkonstante ist:
G0 (jω0,φ) ~ kt (φ)
Bild 6 zeigt den Verlauf der Kreisverstärkung als Funktion des mechanischen Winkels G0 (φ) . In Bild 7 ist der gemessene Verlauf des Raumzeigers (der induzierten Spannung) in Raumzeigerdargestellung aufgetragen. Der Verlauf entspricht dem direkt gemessenen Verlauf aus Bild 5. Bild 8 zeigt die Koeffizienten ci der induzierten Spannung nach einer Fourier Analyse. Gemessen wurden diese Daten mit einem S300 und dem ASCII Kommando
„VKT 100 360 360“
Parameter: 100 Hz (ω0 = 628 s-1) über 360 Grad mit 360 Messpunkten {4}.
Wenn gleichzeitig mit der Messung von G0 (jω0,φ) auch die DC-Komponente gemessen wird, kann aus dem sich ergebenen Verlauf auf das Rastmoment (Rastkraft) geschlossen werden.
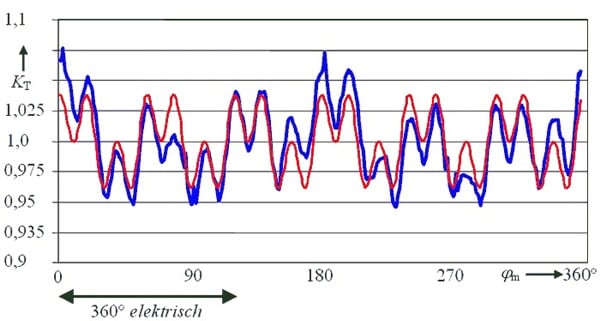
Bild 6: Indirekt gemessener Verlauf der induzierten Spannung
blau: K T als Funktion des mechanischen Winkels (6-poliger Motor)
rot: Annäherung durch die 6. und die 18. Oberschwingung
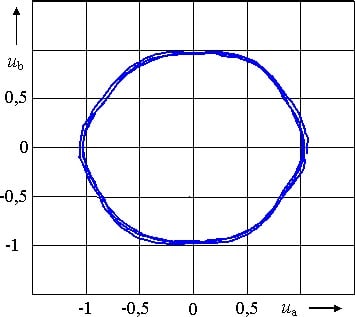
Bild 7: Indirekt gemessener Verlauf der induzierten Spannung in Raumzeigerdarstellung
Zusammenfassung
Gerade bei Direktantrieben ohne motorseitige Lagerung ist die exakte Einhaltung des Luftspaltes nicht problemlos. Als Folge können sich unerwünschte Rastmomente und eine nicht exakt sinusförmige induzierte Spannung (EMK) ergeben. Bei bereits in Maschinen eingebauten Direktantrieben, die normalerweise nicht schnell und oft auch nur weniger als eine Umdrehung drehen dürfen, ist eine Messung der induzierten Spannung ohne weitere Hilfsmittel kaum möglich. Mit dem neuen Verfahren kann die Spannungsform mit hoher Genauigkeit vom Servoverstärker - ohne weitere Hilfsmittel - in der Maschine indirekt gemessen werden. Aufbauend auf diesen Daten ist die bei Direktantrieben meist geforderte Drehmomentvorsteuerung jetzt hochgenau möglich.
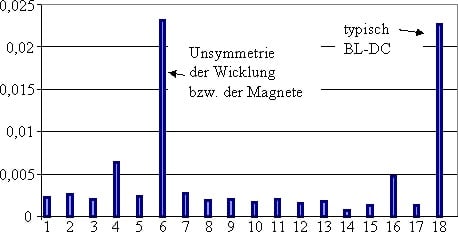
Bild 8: Fourierkoeffizienten von der indirekt gemessenen Kraftkonstante KT(jm)
Die 18. einer „mechanischen Umdrehung“ entspricht hier der 6. einer „elektrischen Umdrehung“
In dem Aufsatz wird gezeigt, wie mit einem „normalen“ Antrieb, bestehend aus Servoverstärker und Motor, eingebaut in einer Maschine, die Form der induzierten Spannung genau gemessen werden kann. Basierend auf der Abweichung von der idealen Sinusform kann die winkelabhängige Drehmomentkonstante kt(φ) des Motors bestimmt werden. Mit diesem winkelabhängigen Faktor kann das Drehmoment deutlich genauer vorgesteuert werden.
Das Verfahren wird an einem Motor mit trapezförmiger (Brushless DC) EMK demonstriert. Dazu wird die EMK erst bei konstanter Drehzahl direkt gemessen und dann mit dem Ergebnis der neuen indirekten Messung verglichen.
Literatur
- Röhrig, Christof: Zur Lageregelung synchroner Linearmotoren für hochdynamische Anwendungen unter besonderer Berücksichtigung der Kraftwelligkeit, Dissertation - Fortschritt Berichte VDI, Düsseldorf 2003.
- L. Springob, J. Holtz: High Bandwidth Current Control for Torque Ripple Compensation in PM Synchronous Machines. IEEE Transactions on Industrial Electronics, Vol. 45, No. 5, 1998, pp. 713-721.
- J. O. Krah: Bode Plot based Autotuning – Enhanced Solution for High Performance Servo Drives. PCIM Power Conversion Intelligent Motion, Nürnberg, May 2004, pp. 382-387 .
- Handbücher S300
Verfasser
Prof. Dr.-Ing. Jens Onno Krah
Fachhochschule Köln
Fakultät IME – NT
Georg Jaskowski
Kollmorgen Europe GmbH
Düsseldorf
