





 Startseite >
Startseite > Knowledge Base >
Knowledge Base > FAQs nach Themen >
FAQs nach Themen > Downloads >
Downloads >HiperFace
HIPERFACE®
steht für High Performance Interface und ist die Standard- Schnittstelle für Motorfeedback- Systeme von SICK- STEGMANN. Diese Schnittstelle wurde speziell auf die Anforderungen der digitalen Antriebsregelung entwickelt und bietet dem Anwender vereinheitlichte und vereinfachte mechanische und elektrische Schnittstellen.
Eigenschaften
- Nur eine Schnittstelle am Drehzahlregler für alle Anwendungen und nur eine Art von Leitung zwischen Drehzahlregler und Motorfeedback.
- Realisierung von Low- als auch High- End- Anwendungen mit nur einer elektrischen Schnittstelle.
- Hybride Schnittstelle aus
- dem analogen Prozessdatenkanal, auf dem Sinus- und Cosinussignale differentiell, nahezu verzögerungsfreiübertragen werden
- dem bidirektionalen Parameterkanal, der RS 485- Spezifikation entsprechend, zur Übertragung der absolutenPosition und weiterer unterschiedlichster Parameter
- Nur 8 Leitungen
- Elektronisches Typenschild zur Identifikation des Motorfeedback und zur Speicherung antriebsrelevanter Informationen im Motorfeedback
- Großer Temperaturbereich, hohe Schock- und Vibrationsfestigkeit, unempfindlich gegen elektromagnetische Störungen und kompakt. Die Geräte können direkt in den Servomotor eingebaut werden.
- Zur Drehzahlregelung stehen analoge Sinus- / Cosinussignale zur Verfügung. Diese ermöglichen sowohl hoheAuflösungen zur Regelung geringer Drehzahlen, als auch ausreichend geringe Signalbandbreite zur Regelunghoher Drehzahlen.
- Kabellängen bis 100 m.
- Einheitliche mechanische Schnittstellen.
- Die Encoderwelle wird fest mit der Motorwelle verbunden, damit sind hohe Regelverstärkungen möglich.
- Einfacher Einbau in den Servomotor. Axiale und radiale Toleranzen werden über eine elastische Statorkupplung (auch: Drehmomentstütze) ausgeglichen.
- Zur Einstellung der Kommutierung kann der Absolutwert der mechanischen Wellenstellung elektronischzugeordnet werden.
- Zur Positionsregelung mechanisch untersetzter Anwendungen stehen die Motorfeedback-Systeme in dergleichen mechanischen Bauform auch als absolute Multiturns, zur absoluten Positionserfassung über 4096Umdrehungen, zur Verfügung.
HIPERFACE®-Motorfeedback- Systeme sind eine Mischung aus Inkrementalgeber und Absolutwertgeber und vereinen die Vorteile beider Geberarten.
Der Absolutwert wird hierbei zunächst nur beim Einschalten des Gerätes gebildet und über die busfähige Parameter- Schnittstelle nach RS485-Spezifikation dem externen Zähler im Regler mitgeteilt, der danach von diesem Absolutwert aus, inkrementell mit den analogen Sinus- / Cosinussignalen weiterzählt.
Durch die Verwendung hochlinearer Sinus- und Cosinussignale wird die zur Drehzahlregelung notwendige hohe Auflösung erreicht (Arcus tangens- Bildung im Regler). Gleichzeitig bleiben jedoch die zu übertragenden Signalfrequen-zen relativ nieder, so entsteht z. B. bei einer Periodenzahl von 512 pro Umdrehung, selbst bei einer Drehzahl von12.000 UPM nur eine Frequenz von 102,4 kHz, welche problemlos auch über weite Strecken übertragbar ist.
Design
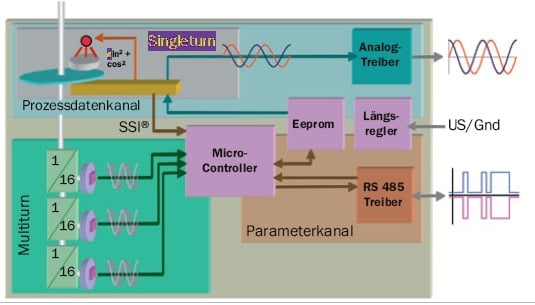
Fig.1
Wie bei Standard- Gebern üblich, befindet sich im Inneren eines Motorfeedback- Systems meist eine Codescheibe aus Glas als Maßverkörperung. Das auf der Scheibe befindliche Codemuster wird im Durchlichtverfahren von einer Infrarot-Diode auf einem voll kundenspezifischen, hochintegrierten Schaltkreis abgebildet. Die Besonderheit der SinCos® Motorfeedback- Systeme beruht nun darin, dass neben der absoluten Codespur auch eine inkrementelle Spur angeordnet ist, welche Sinus- und Cosinussignale erzeugt.
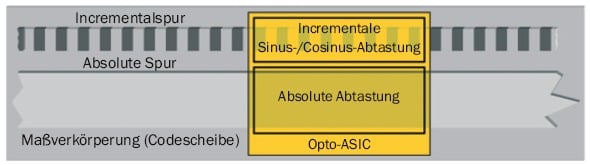
Fig.2
Üblicherweise werden in einem Motorfeedback-System 2n Perioden sinus- und cosinusförmiger Signale abgetastet. Diese Signale stehen jederzeit über den so genannten Prozessdatenkanal als Echtzeit- Information zur Verfügung. Parallel dazu ist über den Parameterkanal (RS485) die absolute Positionsinformation verfügbar, die in erster Linie dazu dient, genau eine dieser 2n Perioden zu identifizieren.
Auswertung
HIPERFACE® definiert die einheitliche elektrische Schnittstelle mit nur 8 Leitungen:
- 2 x Versorgungsspannung 7 … 12V
- 4 x Incrementelle, differentiell übertragene, Sinus-/Cosinus-Signale
- 2 x Digitales, bidirektionales RS485-Interface
Ein Kabel mit Gesamtschirm und 8 paarig verseilten Leitungen überträgt die Signale sicher zum Regler.
Versorgungsspannung
Auf den ersten Blick erscheint es nachteilig, im Regler eine weitere, recht ungewöhnliche Versorgung von typischerweise 8V aufbauen zu müssen. Dies gewährleistet jedoch auch bei langen Distanzen zwischen Regler und Motorfeedback eine ausreichende Versorgungspannung am HIPERFACE®-Motorfeedback- System. Aufwändigere Versorgungen z. B. mit Sense- Leitungen werden nicht benötigt.
RS485- Interface
Das physikalische Interface benötigt einen 130 O - Abschlusswiderstand, zwei Biasing- Widerstände und einen Standard RS485- Transceiver.
Standardmäßig ist die Schnittstelle auf 9600 Bd konfiguriert. Die bidirektionale RS485-Schnittstelle ist prinzipiell busfähig, weshalb jede Kommunikation vom Master, also von der Steuerung, mit der Slave- Adresse beginnt. Zur Minimierung der Übertragungszeiten werden die Informationen binär übertragen. Jedes Protokoll wird mit einer einfach zu berechnenden XOR-Prüfsumme abgeschlossen. Die Protokoll- Ende- Erkennung erfolgt anhand einer Time- out- Steuerung.Die HIPERFACE®- Motorfeedback- Systeme verfügen über interne Diagnose- Funktionen und signalisieren kritische oder fehlerhafte Zustände im Antwortprotokoll.
SinCos®- Schnittstelle
Die Sinus-/ Cosinussignale werden voll differentiell übertragen, ihre Amplitude variiert unter allen Bedingungen um höchstens 20%. Da diese Schnittstelle die eigentliche Performance des Drehzahlreglers gewährleistet, muss dieser Teil des Interface sorgfältig entwickelt werden.
Der Schirm
Auch das Schirmkonzept ist für die erreichbare Performance des Gesamtsystems von großer Bedeutung. Ein beidseitig, am Motor und an der Steuerung, großflächig aufgelegter Kabelschirm erzielt hier meist die besten Resultate.
Die Hochauflösung (Arctan-Interpolation)
Zur Berechnung des hochaufgelösten Winkels innerhalb einer Periode sind viele Verfahren bekannt. Das folgende V erfahren (Fig. 3 ) hat sich dabei als guter Kompromiss bzgl. Codegröße und Ausführungsgeschwindigkeit bewährt:
- Reduzierung der Berechnung auf den 1. Oktanten (0 ... 45°) durch vertauschen und/oder invertieren der Sinus- und Cosinuswerte, damit die nachfolgende
- Berechnung der Division sin (x) / cos (x) immer ein Ergebnis < = 1 hat.
- Tabellengestützte Linearisierung des Divisionsergebnisse zur Annäherung an die Arcus- Tangens- Funktion (ca. 32 Stützpunkte erforderlich).
- Rücktransformation & Erweiterung des Ergebnisses in den unter 1) ermittelten Oktanten.
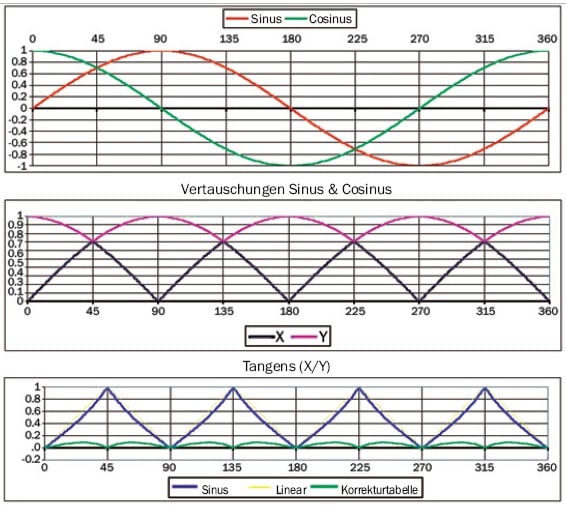
Fig.3 Arctan Interpolation
Synchronisation
Der Überlauf, bzw. die Flanken auf den verschiedenen Übertragungswegen werden in Realität nie zum exakt identischen Zeitpunkt auftreten. Dies lässt sich durch folgende Effekte erklären:
- die absolute Position wird über separate Codespuren ermittelt und weicht deshalb geringfügig von der aus den Analogsignalen interpolierten Position ab (s. Fig.4). Diese Phasenlage kann sich deshalb innerhalb einer Umdrehung um bis zu ± 4/32 einer Periode verändern.
- dynamische Effekte, wie Signallaufzeiten oder unterschiedliche Eingangsfilter
- Hysterese, z. B. am Komparator des Quadraturzählers
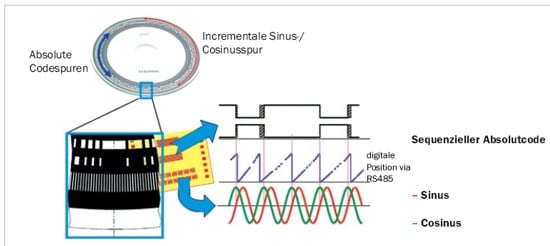
Fig.4
Die Synchronisation beschreibt nun ein Verfahren welches diese Effekte in weiten Grenzen (± 1/2 Periode) kompensieren kann. Damit ist es möglich, auch bei hohen Drehzahlen die analogen Signale einer bestimmten Periode zuzuordnen. Dabei werden jeweils die überlappenden Bits zweier unterschiedlicher Positionsinformationen auf gleiche Wertigkeit ausgerichtet und dann die Differenz der Positionswerte gebildet. Zeigen die beiden Positionswerte in unterschiedliche Perioden, wird der niedriger aufgelöste Positionswert in Richtung der kleineren Differenz um ± 1 Periode korrigiert.
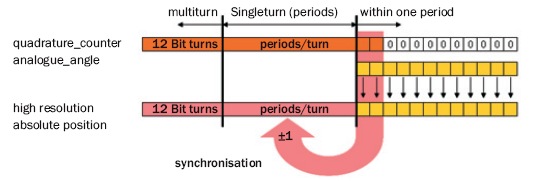
Fig.5
- quadrature_counter:
der im Regler mitgezählte Positionswert mit einer Auflösung von 4* Periodenzahl - analogue_angle:
der aus den Analogsignalen berechnete Winkel innerhalb einer Periode - absolute_position:
die über den Parameterkanal ausgelesene absolute Position
Quelle
Hiperface Beschreibung, Sick/Stegmann, 8 010 701/2008-04-02, MD/3/500
