





 Página inicial >
Página inicial > Base de conhecimento >
Base de conhecimento > FAQs >
FAQs > Downloads >
Downloads >Processo de Tuning do Drive ABD em Eixos Horizontais e Verticais
Os servo-motores são controlados por drives que utilizam um método chamado de malha de controle. A malha executa um cálculo com a realimentação da posição do motor e o valor de comando, visando reduzir ao máximo o erro através do ajuste dos ganhos. Ao final do ajuste tem-se como resultado a precisão, observada no posicionamento executado por sistema servo-acionados.
Quando realizamos um Tuning, nosso objetivo é preparar a malha de controle para que todo a planta (mecanismo) fique em perfeita harmonia, ou seja, sem ruídos, sem solavancos e com a força necessária para rodar a aplicação.
Executando o Tuning (Passo a Passo)
1. Precauções
Para realizar o processo de tuning tanto em eixos horizontais quanto em eixos verticais é crucial considerar as seguintes precauções antes de iniciar o processo:
- Certificar-se de que o eixo tem um curso livre para executar movimentos.
- Garantir que uma parada de emergência possa ser efetuada a qualquer momento.
- Garantir que o motor está devidamente acoplado a mecânica da aplicação.
- Evitar tocar nas peças móveis da máquina durante a operação.
2. Conectando o ABView ao Drive ABD
Baixe o instalador do link: (ABD & ABM) Altra Brasil Servo Series | Kollmorgen
Descompacte o arquivo .zip e executar o Setup.exe
1.2. Instalação do driver USB
Abra o Gerenciador de Dispositivos (Device Manager) do Windows.
Localize Other devices > ABD USB COMM .
Atualize o driver USB usando o arquivo \USB Drivers\windows_drivers\usb_dev_bulk.inf da pasta descompactada do instalador.
Passo a passo:
Instale o Driver USB
Depois de instalar o software ABView com sucesso, também pode ser necessário instalar o driver USB.
Se você instalou a unidade USB com sucesso, você pode pular o que está descrito nesta seção; caso contrário, siga as etapas abaixo para instalar o driver USB:

Passo 1 Após a instalação bem-sucedida do software ABView, conecte o Drive ao PC utilizando o cabo de conexão USB.
Passo 2 Abra o diretório principal do software ABView (o local padrão é C:\ABDView\) e extraia o arquivo compactado USB Drivers.rar para um diretório apropriado do seu PC.
Passo 3 Abra o Gerenciador de Dispositivos.
- Para o sistema operacional Win7, selecione o menu Start > Painel de Controle.
Clique em Gerenciador de Dispositivos em Todos os Itens do Painel de Controle mostrados.
- Para o sistema operacional Win10, clique com o botão direito no menu Start, e selecione Gerenciador de Dispositivos no menu pop-up.
Passo 4 Um ponto de exclamação aparece ao lado da opção Outros dispositivos > ALTRA BRASIL USB COMM na janela do Gerenciador de dispositivos, o que indica que ocorreu um erro no driver e precisa ser atualizado.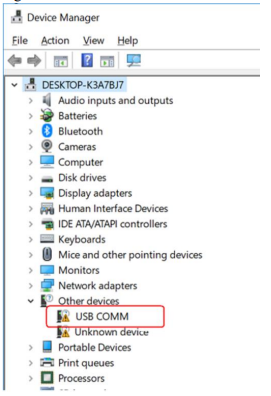
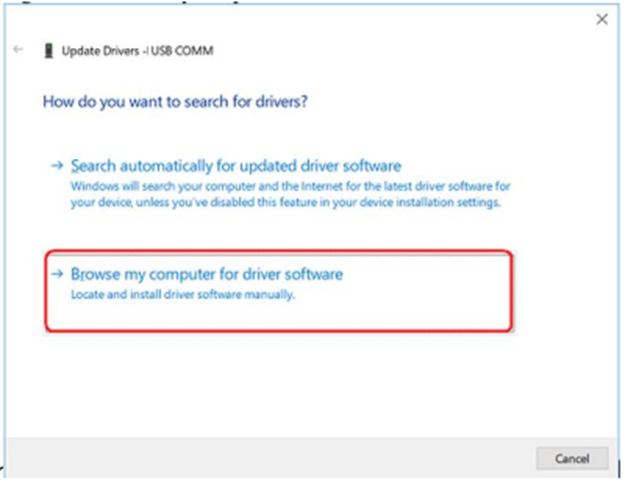
Passo 5 Clique com o botão direito em ALTRA BRASIL USB COMM e selecione Atualizar driver no menu pop-up.
Passo 6 Clique em Procurar driver em meu computador na caixa de diálogo Atualizar drivers
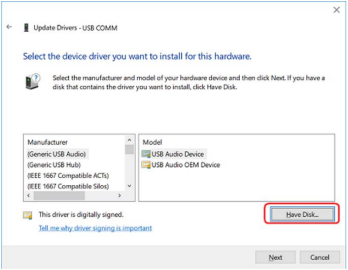
Passo 7 Clique em Me deixe escolher de uma lista de drivers no meu computador.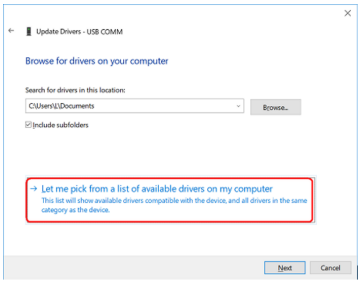
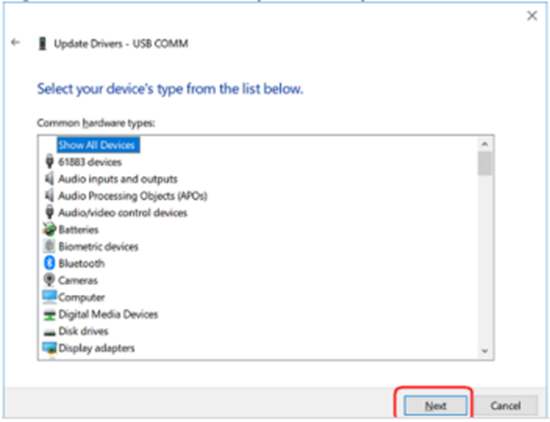
Passo 8 Clique em Próximo.
Passo 9 Clique em Selecionar Disco.
Passo 10 Clique em Pesquisar na caixa de diálogo Instalar do disco.
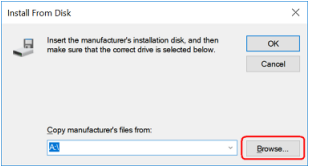
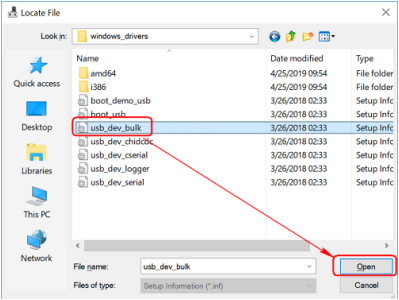
Passo 11 Busque o diretório onde foi baixado o arquivo de driver do ABD pela caixa de diálogo Localizar arquivo.
Passo 12 Selecione o arquivo usb_dev_bulk.inf, e então clique em Abrir.
Passo 13 Clique em OK na caixa de diálogo Instalar do Disco.
Passo 14 Selecione Generic Bulk Device, e então clique em Próximo.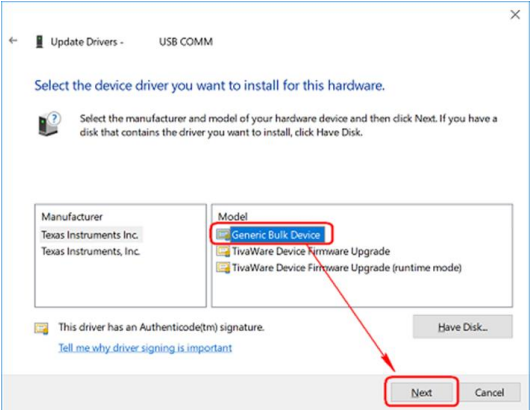
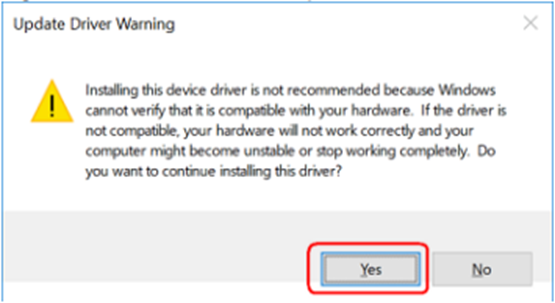
Passo 15 Clique em Sim na caixa de diálogo Aviso de instalação de driver.
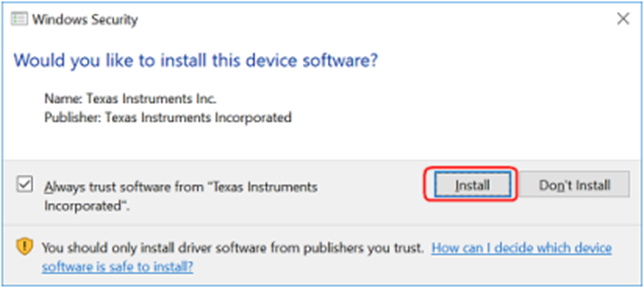
Passo 16 Aguarde um momento, e então clique em Instalar na caixa de Segurança do Windows.
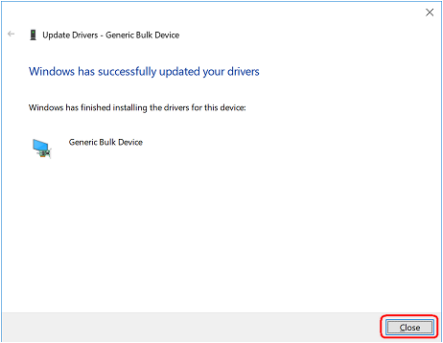
Passo 17 O driver será instalado automaticamente no seu PC e o resultado da instalação será exibido. Clique em Fechar para concluir a instalação do driver USB.
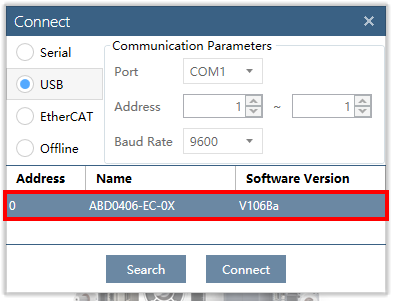
Após instalar o driver USB, abra o ABView e na aba Home e clique no ícone Conect
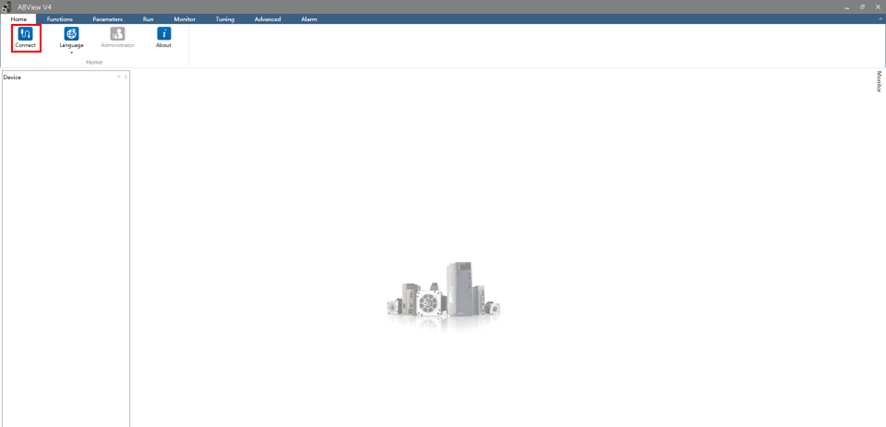
Escolha a opção USB e depois clica em Search para buscar o drive. O código do drive irá aparecer após a busca e em seguida será possível se conectar no drive com o botão Connect.
3. Configurando o Tuning.
Com o ABView conectado ao ABD, precisamos mudar a método de tuning do drive para o método “One-Parameter Auto-Tuning” e tipo de estabilização para Estável na tabela de parâmetros.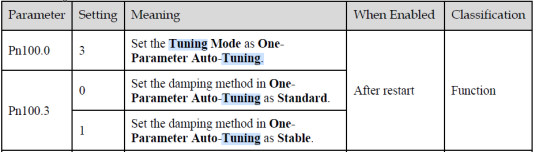
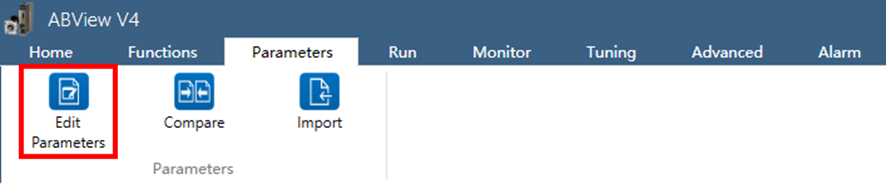
Para acessá-la abra aba Parameters e clique no ícone Edit Parameters.
Após abrir a tabela de parâmetros, e caso a coluna Value esteja em branco clique em Upload All para trazer os dados, em seguida busque pelo parâmetro Pn100.0 para configurar o método de tuning para o valor 3 e o parâmetro Pn100.3 para configurar o tipo de estabilização para o valor 1.
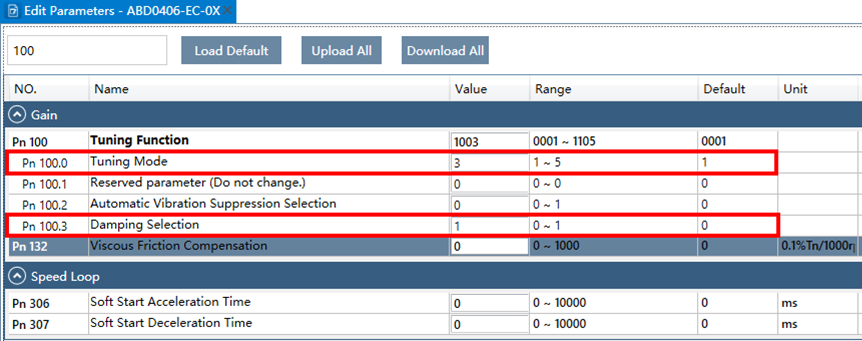
Depois de alterar os valores dos parâmetros clique em Download All e reinicie o drive.
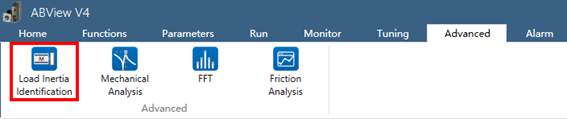
4. Medição de inércia
Após reiniciar, será necessário conectar novamente o ABView, acessar a aba Advanced e clicar no ícone Load Inertia Identification.
Clicando no ícone irá aparecer um poup-up explicativo da função e para passar para próxima tela clique no OK.
Na próxima tela terá que selecionar os números de voltas necessários para medição de inércia, habilitar o eixo no interruptor de Servo OFF para Servo ON e clicar no botão Run para iniciar a medição de inércia.

Após terminar a medição será mostrado o valor medido e o ideal é que seja feita a medição pelo menos três vezes com o valor medido resultando em números iguais.
Depois de conseguir um resultado satisfatório, clique em Save para salvar o valor medido e concluir a medição de inércia.
Em seguida ajuste o parâmetro Pn112 para 100, faça download do parâmetro e reinicie o drive.

5. Configuração do osciloscópio e movimento de serviço.
Agora para analisar o resultado do tuning será necessário armar um gráfico e analisar o erro de posição em um movimento reverso curto.
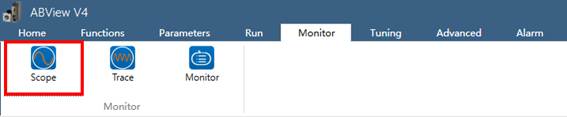
Para localizar o gráfico abra a aba Monitor e clique no ícone Scope para abrir o osciloscópio.
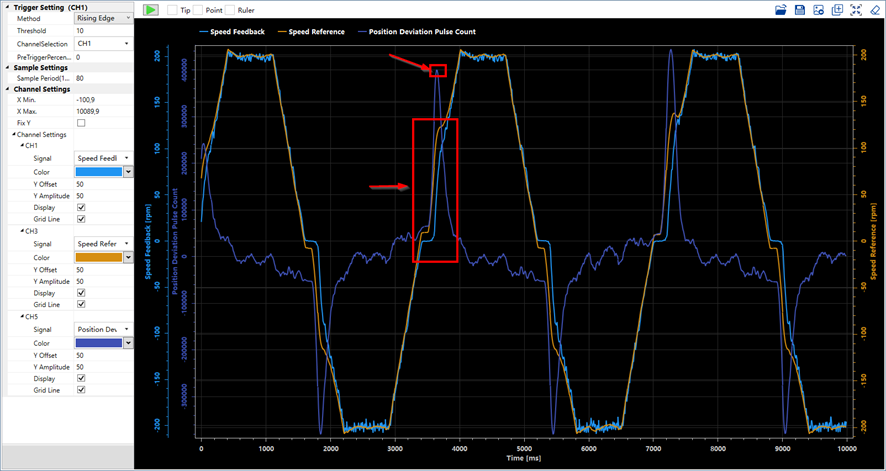
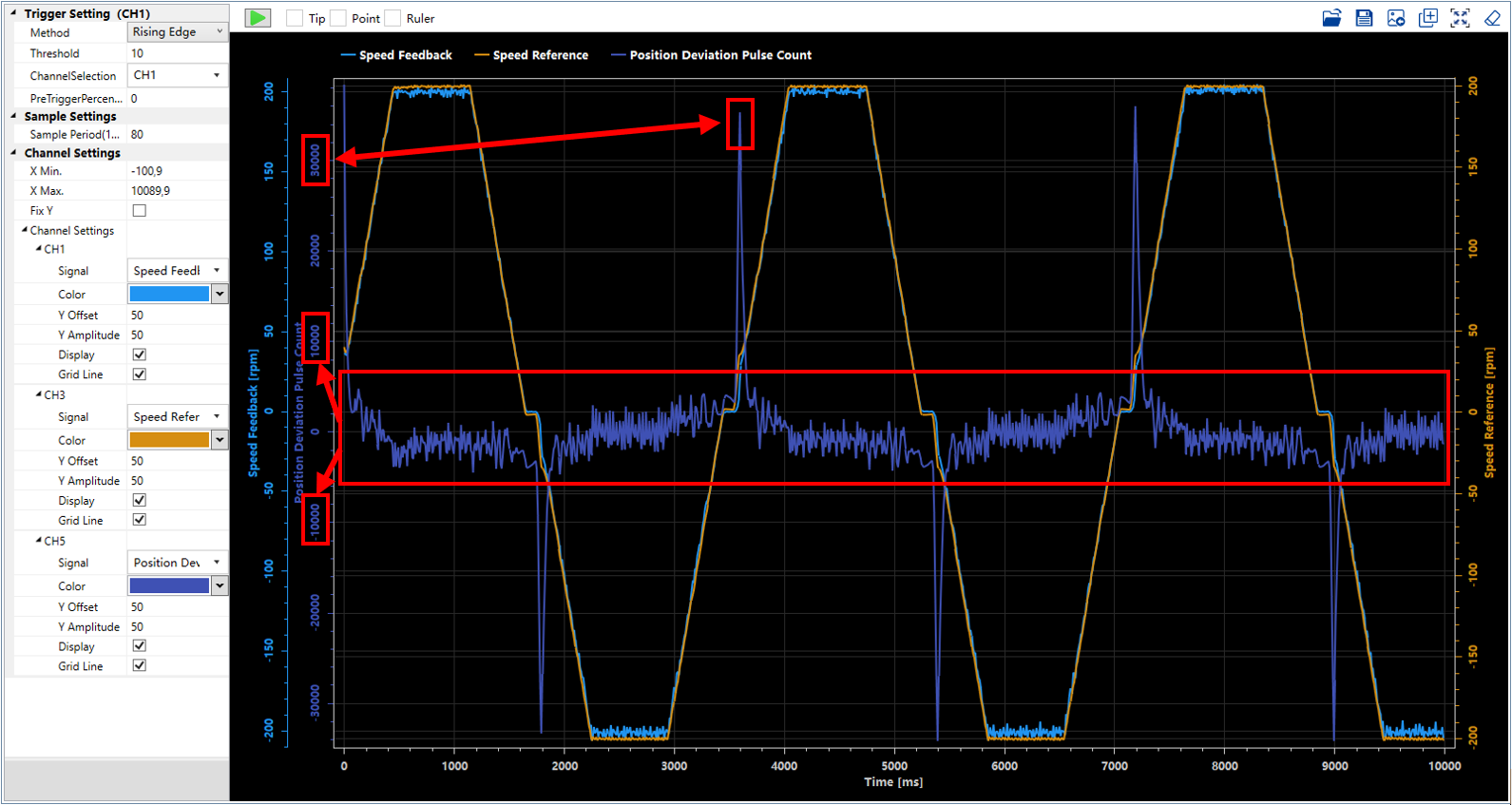
Ao abrir o osciloscópio é necessário configurar o gatilho em Trigger Setting, o período de gravação em Sample Settings e os canais que o gráfico irá gravar em Channel Settings, sendo que os canais que devem ser configurados são os Speed Feedback (Velocidade Real), Speed Reference (Velocidade de Comando) e Position Deviation Pulse Count (Erro de posição).
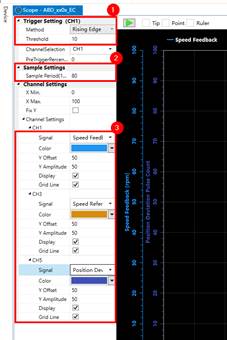
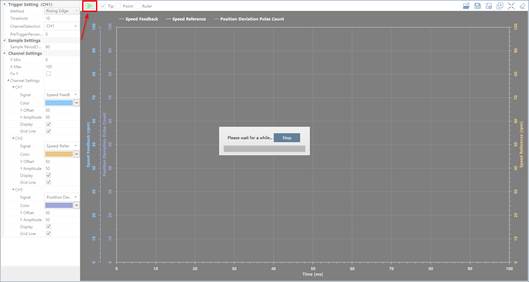
Ao configurar conforme a imagem, basta clicar na seta verde que o osciloscópio irá aguardar o comando de movimento para iniciar a gravação.
Agora para configurar o movimento reverso vá até a aba Run e clique no ícone PJOG.

Configure o número de voltas e o sentido usando os sinais positivo (+) e negativo (-), a velocidade máxima de movimento e as rampas de aceleração/desaceleração conforme a imagem abaixo.
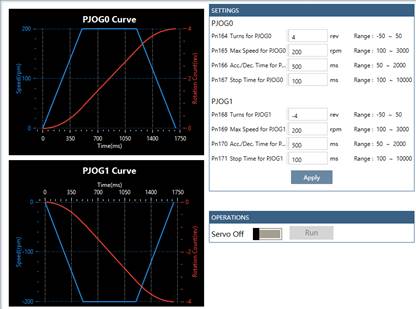
Após configurar clique em Apply para aplicar as configurações e mude o interruptor para Servo On e clique em Run para começar o movimento. Em seguida volte para o gráfico e verifique como está o erro de posição.
No exemplo abaixo pode ser observado que o Position Deviation Pulse Count ou erro de posição, que é a principal métrica do tuning, está chegando aproximadamente em 400000 pulsos e está distante do 0. Outro ponto que deve ser analisado é que o período em que o eixo está movimentando a velocidade real não consegue acompanhar a velocidade de comando ficando um desfasada.
6. Ajuste do ganho de rigidez.
Para melhorar o movimento e reduzir o erro de posição, devemos alterar o ganho de rigidez localizado no parâmetro Pn101.

Para determinar o ganho de rigidez deve diminuir ou aumentar o valor e analisar um movimento pelo gráfico a cada alteração, até que chegue num resultado satisfatório.
6. Análise do gráfico
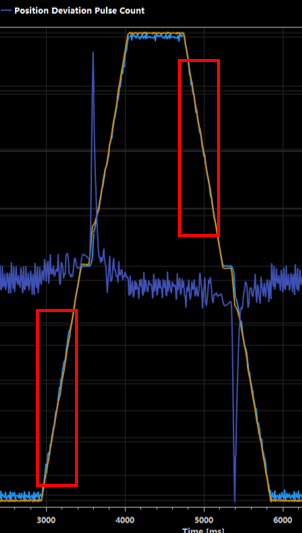
Ao concluir os ajustes de tuning mencionados anteriormente, deve-se chegar num resultado de erro de posição com o pico sendo abaixo de 50000 pulsos e com média do erro abaixo de 10000 pulsos, conforme mostrado no exemplo abaixo.
![]()
Repare no exemplo que após realizar os ajustes a velocidade atual consegue acompanhar a velocidade de comando, como se estivesse se sobrepondo uma acima da outra.
Ao seguir estes passos a passos e ajustar os parâmetros corretamente, é possível otimizar o desempenho do drive ABD para atender às necessidades específicas da aplicação.