





 Página inicial >
Página inicial > Base de conhecimento >
Base de conhecimento > FAQs >
FAQs > Downloads >
Downloads >Processo de Autotune do Drive AKD em Eixos Horizontais
Os servo-motores são controlados por drives que utilizam um método chamado de malha de controle. A malha executa um cálculo com a realimentação da posição do motor e o valor de comando, visando reduzir ao máximo o erro através do ajuste dos ganhos. Ao final do ajuste tem-se como resultado a precisão, observada no posicionamento executado por sistema servo-acionados.
Quando realizamos um Autotune, nosso objetivo é preparar a malha de controle para que todo a planta (mecanismo) fique em perfeita harmonia, ou seja, sem ruídos, sem solavancos e com a força necessária para rodar a aplicação.
O Autotune é uma ferramenta exclusiva Kollmorgen, desenvolvida para realizar medições da aplicação como: inércia da aplicação, força necessária para mover para cada um dos lados e reação do motor a uma alta gama de frequências. Os resultados da medição são utilizados para fazer o ajuste automático dos ganhos da malha de controle, não havendo a necessidade de intervenção manual do usuário.
Executando o Autotune (Passo a Passo)
1. Conectando o Workbench ao Drive AKD
Primeiro conectar o Worbench(PC) ao AKD, através do protocolo TCP/IP. Isso deve ser feito plugando um cabo de rede no seu computador e na porta superior do AKD (X11).
Podemos utilizar um IP fixo ou IP dinâmico:
- No IP dinâmico o as “S1” e “S2” do AKD devem estar na posição zero e o seu computador também deve estar configurado com IP Dinâmico.
- No IP fixo é necessário configurar o endereço de IP do computador na mesma faixa do AKD. O IP do AKD é sempre do range 192.168.0.XY, onde a chave “S1” altera o número da letra X e a chave “S2” altera a letra Y do IP.

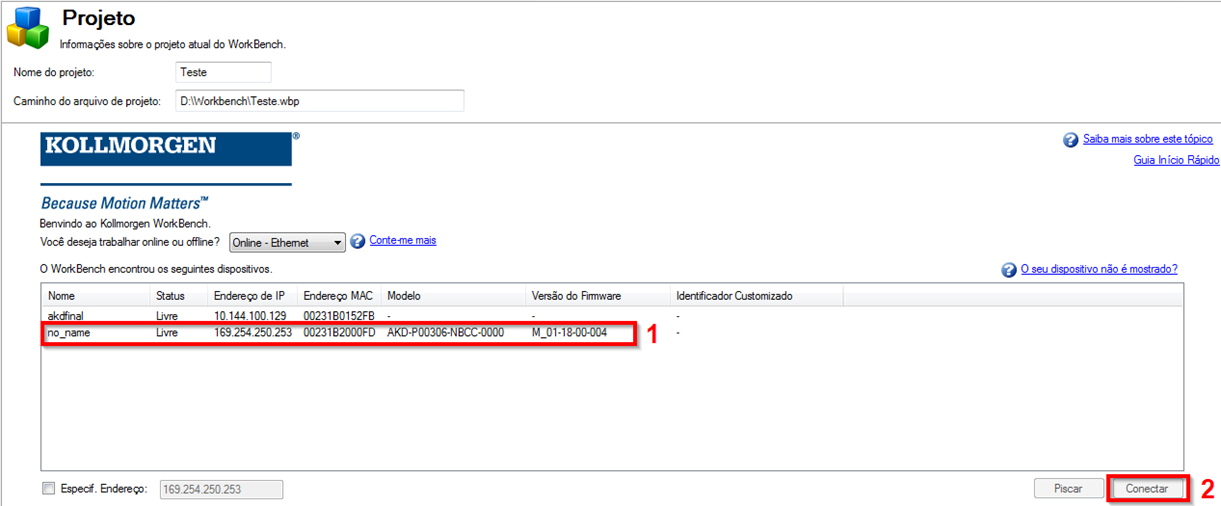
Com o IP devidamente configurado e com o cabo conectado, basta clicar no drive que será listado na tela acima(1) e no botão conectar (2).
2. Acessando o Autotune/Tuner de Desempenho do Servo
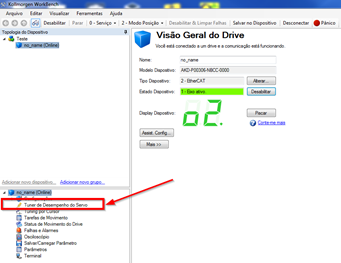
Com o Workbench conectado ao AKD, precisamos mudar a fonte do comando do drive para o modo “Serviço”. Esse modo libera o acesso ao menu de configuração do Autotune.

3. Configurando o Autotune
Após clicar em “Tuner de Desempenho do Servo”, será aberta a tela onde é feita a parametrização e comando do início do processo do Autotune.
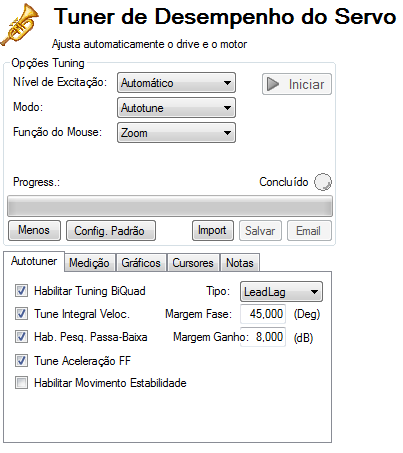
Antes de iniciar, deve-se fazer a configuração das opções abaixo:
-
Escolher a opção “Nível de excitação” como automático e “Modo” em Autotune;
-
Desmarcar o último item “Habilitar Movimento Estabilidade”;
4. Executando o Autotune
Após essas configurações deve-se apertar o botão “Iniciar”. Durante o processo é comum ouvir um barulho (ruído de frequência) e também haverá uma pequena movimentação do motor (menos de uma volta), os dois comportamentos são normais.
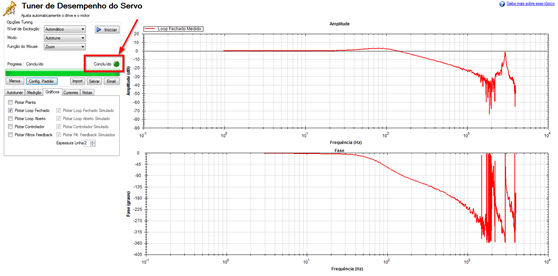
Após o AKD finalizar o autotune, pode-se ver a indicação de “Concluído” e os gráficos serão plotados na tela.
5. Analisando o Resultado do Autotune
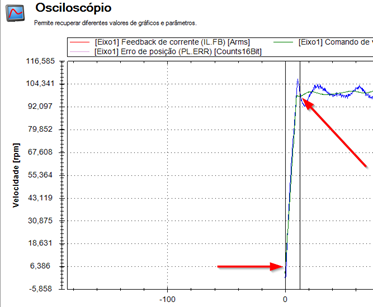
Osciloscópio
Dentro do Workbench existe um osciloscópio digital que permite analisar uma grande variedade de parâmetros do drive no tempo. Nele pode-se configurar até 6 canais distintos.
Configurações os Canais do Osciloscópio
Para conseguir validar um Autotune é necessário configurar 4 canais, conforme figura abaixo.
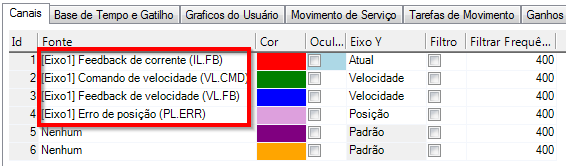
Observando esses 4 parâmetros, pode-se comparar o comando enviado para o drive juntamente com a resposta do feedback do motor. Quanto mais sobrepostos eles estão, melhor será o comportamento dinâmico do sistema.
Configurações o Tempo de Gravação e o Trigger do Osciloscópio
Após configurar os canais é necessário programar o tempo de gravação e também o trigger para iniciar a captura.
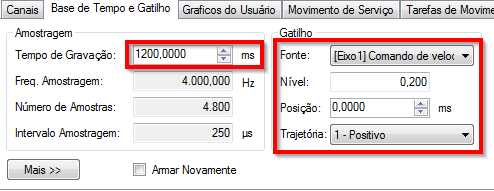
A figura acima mostra como configurar um tempo de gravação de 1,2s e como estabelecer um trigger (gatilho) no parâmetro “[Eixo1] Comando de velocidade (vl.cmd)”. No campo “Nível” é programado o valor de 0.2, com essa configuração o osciloscópio será o for iniciado quando uma velocidade acima de 0.2 rpm for comandada no drive, ficando ativo por 1,2s.
Movimento de serviço
Com o osciloscópio configurado, faz-se necessário programar um movimento no eixo que fizemos o Autotune.
O melhor tipo de movimento para avaliar a qualidade é programar um movimento de reversão com velocidade de 100rpm.
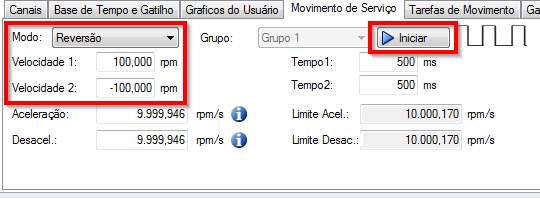
Nesse ponto apertarmos o botão “Iniciar” o eixo irá se mover sentido positivo a 100 rpm por 500ms e mudará de sentido para alcançar -100rpm por também 500ms.
Plotando o Gráfico do Movimento
Agora precisamos armar o osciloscópio e mover o eixo para analisar os resultados.
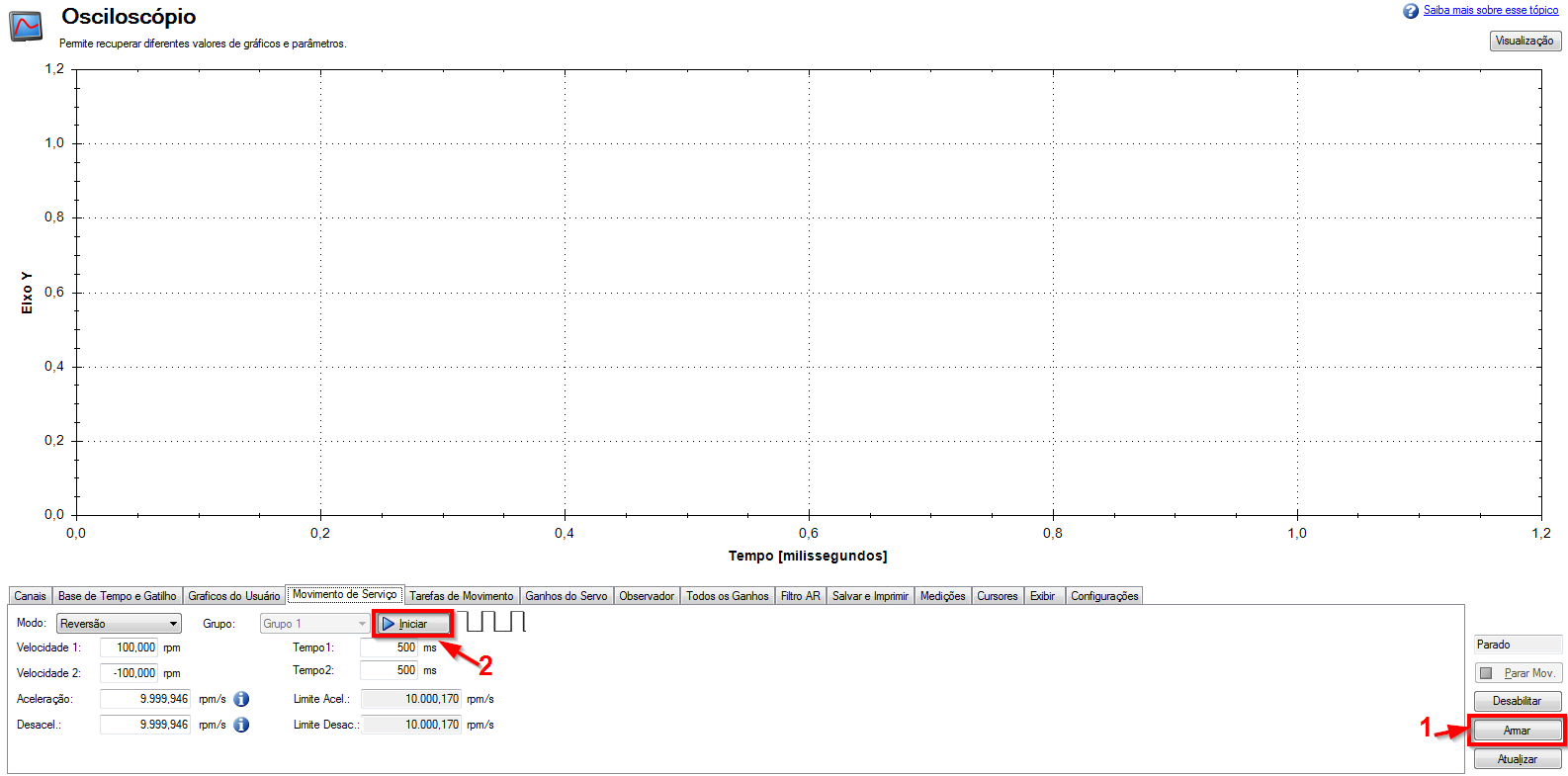
- Primeiro clique no botão “Armar”, nesse momento o osciloscópio está aguardando um valor de velocidade de comando maior que 0.2 para poder começar a gravar os dados;
- Clique no botão iniciar, agora o eixo começará a se movimentar;
- Quando o gráfico aparecer na tela, podemos parar o movimento;
Analise 01: Tempo de Acomodação no Osciloscópio
Uma boa análise do gráfico de movimento incluí a medida do tempo de acomodação. Para faze-la selecione a aba “Cursores” e habilite a opção “Mostrar Cursores”.

Os cursores são que marcadores e podem ser inseridos no gráfico para que seja possível realizar a medição entre dois pontos. Com eles habilitados, posicione-os conforme figura abaixo:
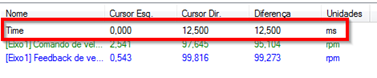
Observe que o primeiro cursor está na posição inicial do movimento e o segundo na posição final (quando o movimento estabiliza – termina a aceleração).
Essa medida retorna o valor de 12.5ms.
Analise 02: Tempo de Acomodação no Gráfico de Bode
O tempo de acomodação também pode ser medido através da utilização do diagrama de bode, gráfico gerado durante a realização do Autotune. Para isso deve-se habilitar a opção “Plotar loop aberto” e escolher como função do mouse: “Cursores”.
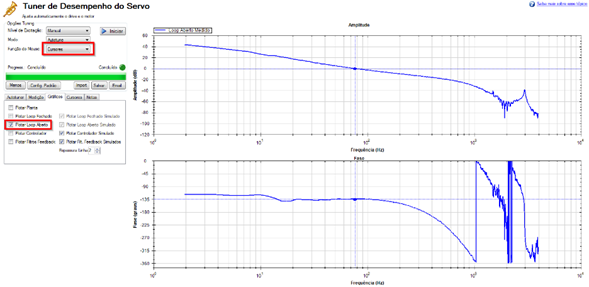
Após essa configuração, é necessário posicionar o cursor (arrastando com o mouse) no ponto “0” – O tempo de acomodação é calculado sendo o inverso da frequência na posição onde o gráfico de amplitude cruza o ganho zero.
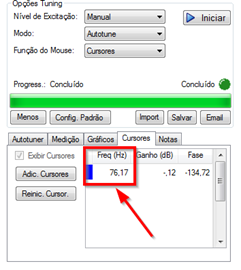
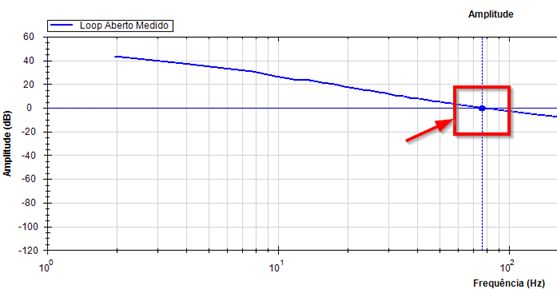
Como podemos ver o ponto onde cruza o zero a frequência tem o valor de 76,17hz calculando o inverso, chegamos ao valor de 13,12ms para o tempo de acomodação.
Analise 03: Erro de Posição utilizando o Osciloscópio
A medida do erro de posição é realizada de maneira bem simples, basta acrescentar o parâmetro “[Eixo 1] Erro de posição PL.ERR” ao osciloscópio.
Feito isso realizamos a gravação a partir do movimento de serviço e entramos na aba “Medições” para ver o valor “True RMS”.

Importante notar que a unidade desse valor depende do que está configurado como unidade padrão para o AKD. No exemplo acima está configurado que 1 volta do motor possuí 16bits, por tanto precisamos fazer uma regra de três:
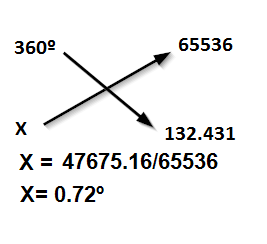
É possível configurar para que esse valor fique em graus ou unidades personalizadas.

Depois de realizados os passos acima e realizado as análises correspondentes o Autotune está concluído. Caso ele não atenda as expectativas ou não foi possível atingir os resultados esperados nas análises realizadas, é necessário fazer um tune manual. Em anexo está um manual explicando como realizar as alterações de ganhos (KP e KI) e utilização de filtros.
Back to top